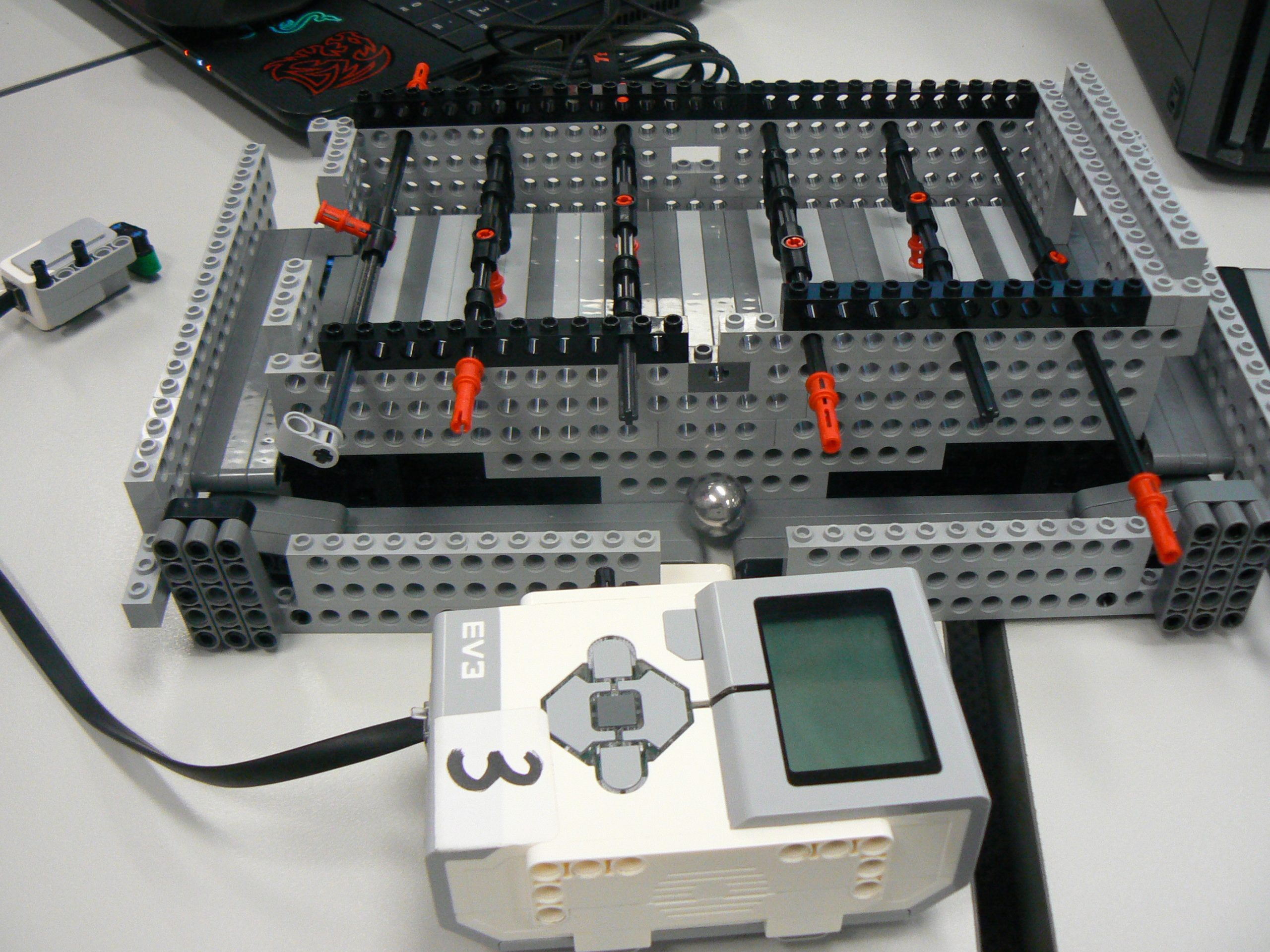
 Our robot was meant to be a table soccer game where a player would verse another player by turning pegs to hit a ball into a goal. It would keep track of the score of each player.
Our robot was meant to be a table soccer game where a player would verse another player by turning pegs to hit a ball into a goal. It would keep track of the score of each player.
We did not fully complete it and could not get the touch sensor working correctly but did have a working program to go with it. Not all members were here each lesson.
Team members
- Aaron N
- Brandon H
- Rob C
