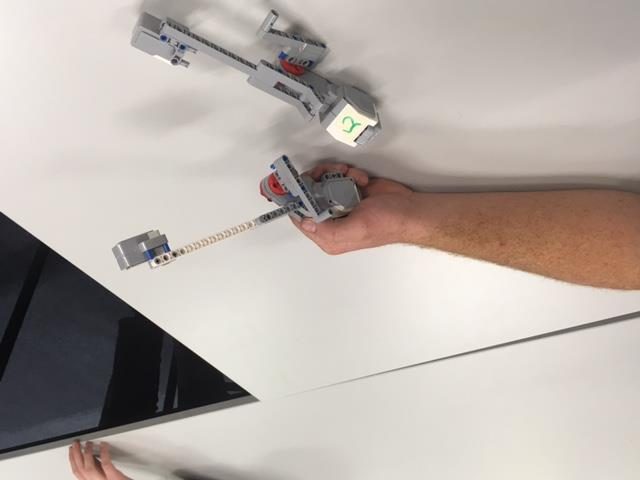

Our game is a fishing game. We built a fishing rod out of LEGO and the EV3 brick.
The gryo sensor detects when you cast the rod. You then wait until you get a bite. If you get a bite, start winding. If not, cast again. As you wind in, there will be some fight back in the reel. We did this by making the motor move backwards and forward quickly to simulate a fish fighting.
This was a two-player game. Whoever reels in the fish first wins.
We chose this project because Callum and Matthew like fishing.
The hardest part during this project was the fight back with the fish – trying to get the right amount of fight.
If we could improve anything, we’d like to make it wireless, so there weren’t cables to the EV3 brick.
