We chose to make a prototype robotic hand designed to assist people suffering from Parkinson’s disease, and other debilitating conditions that effect the motor function – in other words the strength and dexterity – of the fingers and hand. An exo-skeleton arm, or ExoArm.
We chose this disease and solution because:
1) Parkinson’s disease inhibits movement. It is caused by nerve cells in the brain malfunctioning. (https://www.webmd.com/parkinsons-disease/tc/parkinsons-disease-topic-overview#1)
2) Parkinson’s can affect the hands to the point of them not being useful for everyday tasks, which can have all sorts of negative repercussions throughout the remainder of one’s life. (http://www.outthinkingparkinsons.com/articles/hands-fingers)
3) A potential solution to this is the creation of an artificial ‘exoskeleton arm’, to assist with hand mobility, and stop the disease interfering with the everyday lives of patients. (https://spectrum.ieee.org/the-human-os/biomedical/devices/exoskeleton-could-quell-the-tremors-of-parkinsons-disease-patients-at-crucial-moments)
4) This concept could also be used to assist in the case of other motion inhibiting diseases, conditions and injuries. For example a quadriplegic person who still has some control of their fingers would greatly benefit from one such device. (https://www.newscientist.com/article/2115340-robotic-hand-exoskeleton-lets-quadriplegic-people-use-cutlery/)
And finally: while Parkinson’s is a terrible disease, and a functioning exoskeleton arm could be greatly beneficial, what finally pushed us to choose this project was how cool robotic hands looked!
Evaluation
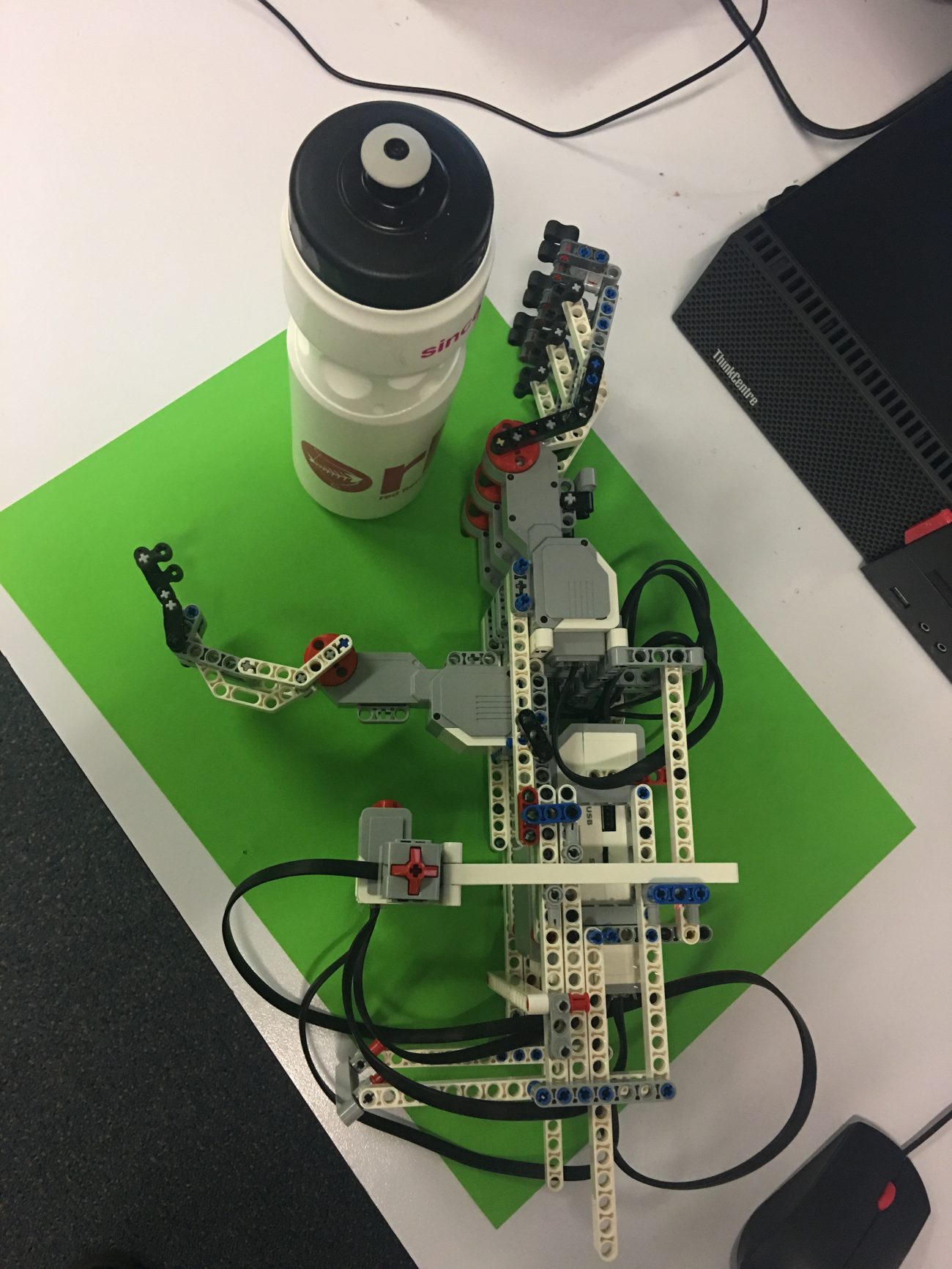
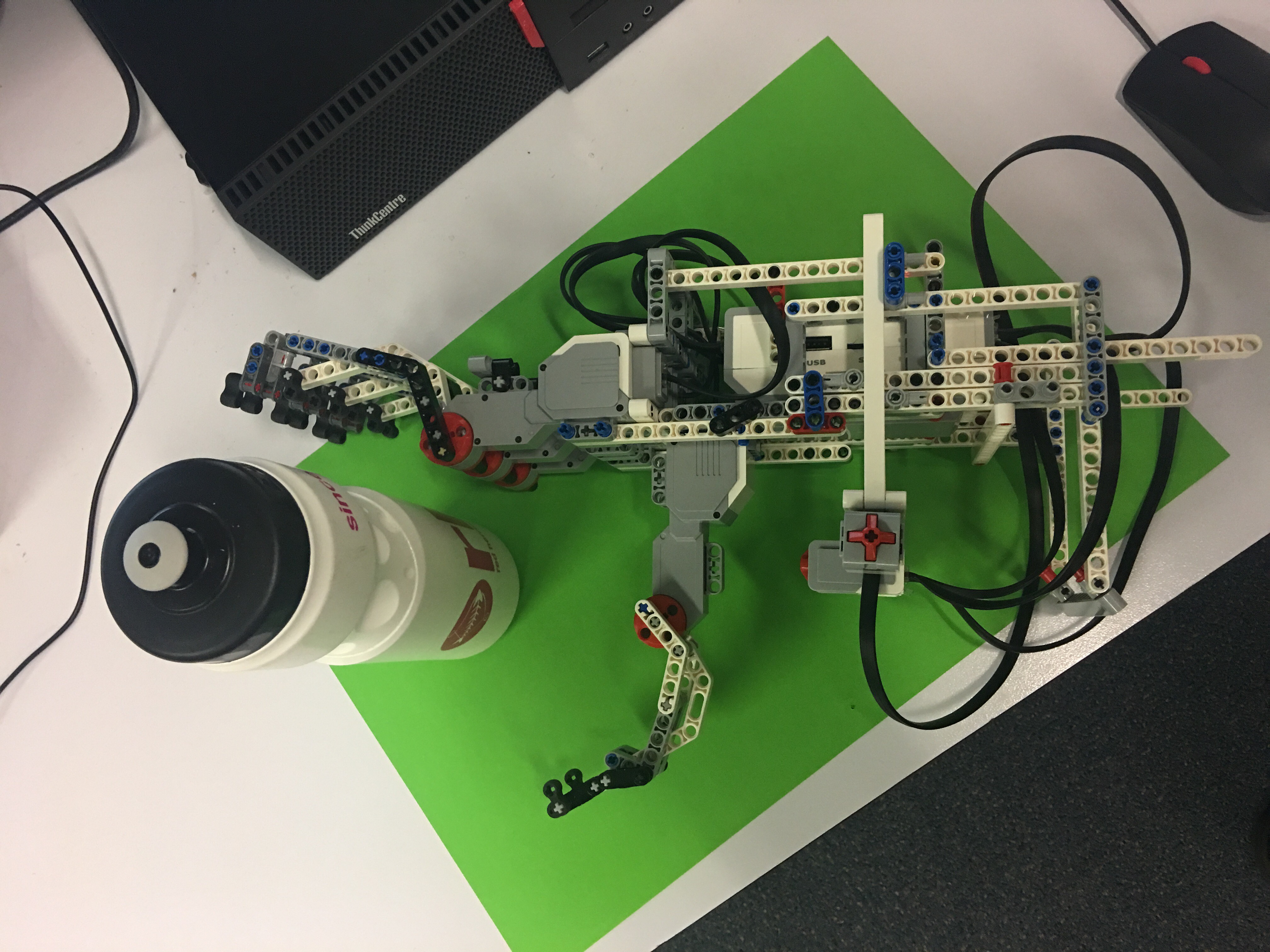
Our final product was a basic exoskeleton hand with articulating fingers operated by the press of a button. However, as stated in the intro, this was a prototype; our device was clumsy and awkward, and it weighed a ton – it would require more strength and precision to operate the arm than it would just to pick something up. Whilst our prototype may not have any useful real world application, it is a good indication that with more time and better equipment a useful exoskeleton arm could be created.
Acknowledgements
1) Diavo Voltaggio – a LEGO enthusiast who build a robotic arm for Brick Fair. We were inspired by his three finger design, and just how good his hand looked. His YouTube channel is available at (https://www.youtube.com/channel/UCakumsf9lLEH2KgCzTlgkFQ)
2) Builderdude35 – a LEGO YouTuber whose anti-stalling program we implemented in our device.
Upgrades
Given more time and resources, there are a number of upgrades we would like to make
1) It would be cool to give the fingers joints (using complex pivoting mechanisms as opposed to additional motors), more accurately replicating the human hand.
2) We would add a 4th finger, once again more accurately replicating the human hand, however for this we would need to use a second brick, increasing the weight and complexity a lot.
3) We would implement pressure sensors as opposed to touch sensors, which would allow for more control of the fingers – the harder the button gets pressed, the faster the finger closes.
4) We would refine our attachment mechanism, resulting in a tighter, more comfortable fit on the arm, and a reduction in weight and bulk.
5) We would refine the program to speed up the finger closing action, and to upgrade the anti-stalling function of it, allowing the hand to grip objects with more strength.
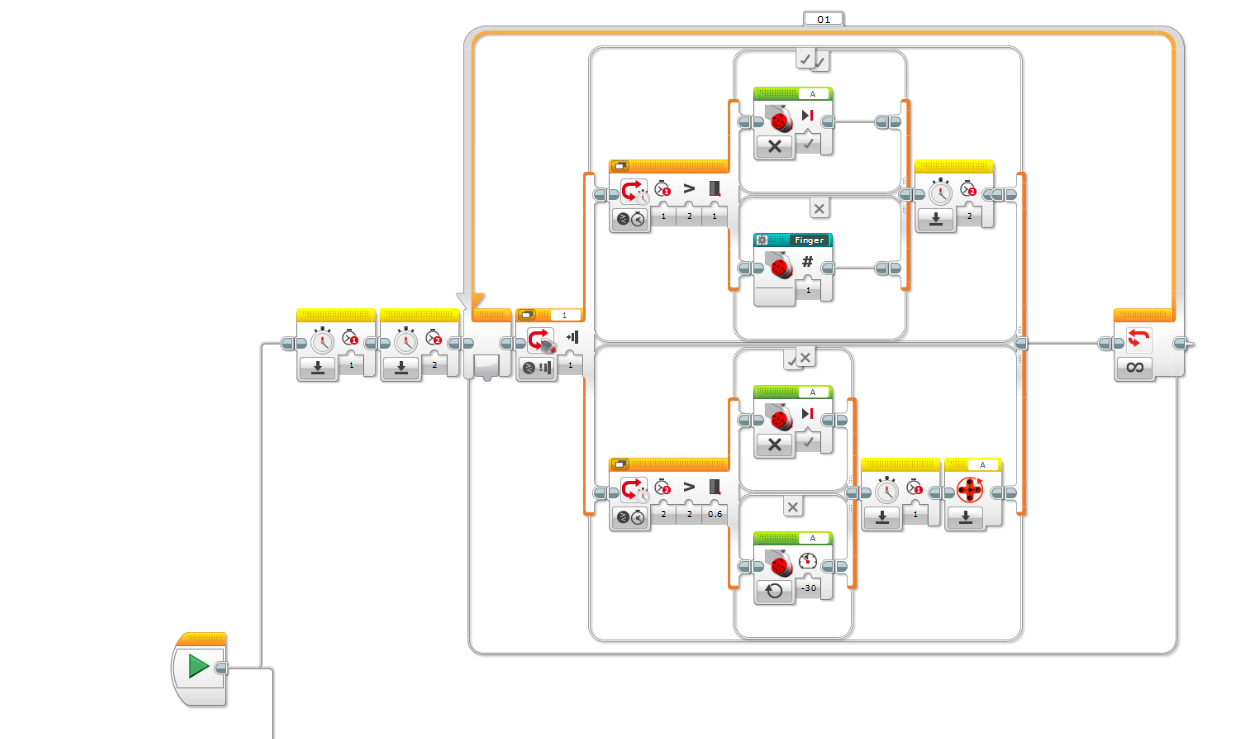
Screenshots
Program for one finger (This was repeated 4 times)
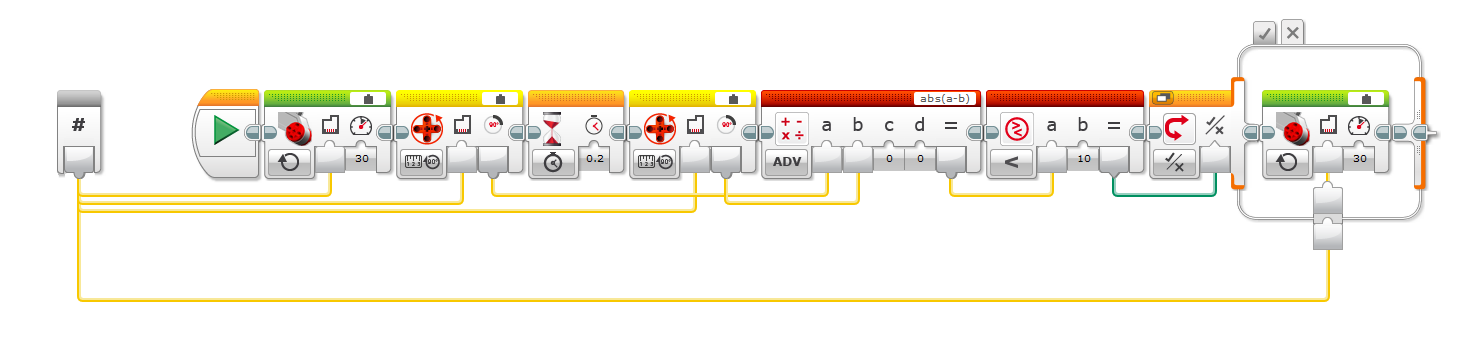
Program for custom block ‘Finger’ (used within the program for each finger movement)
Team: Barney Russell, Benjamin Bruce and Kindilan Hayes.