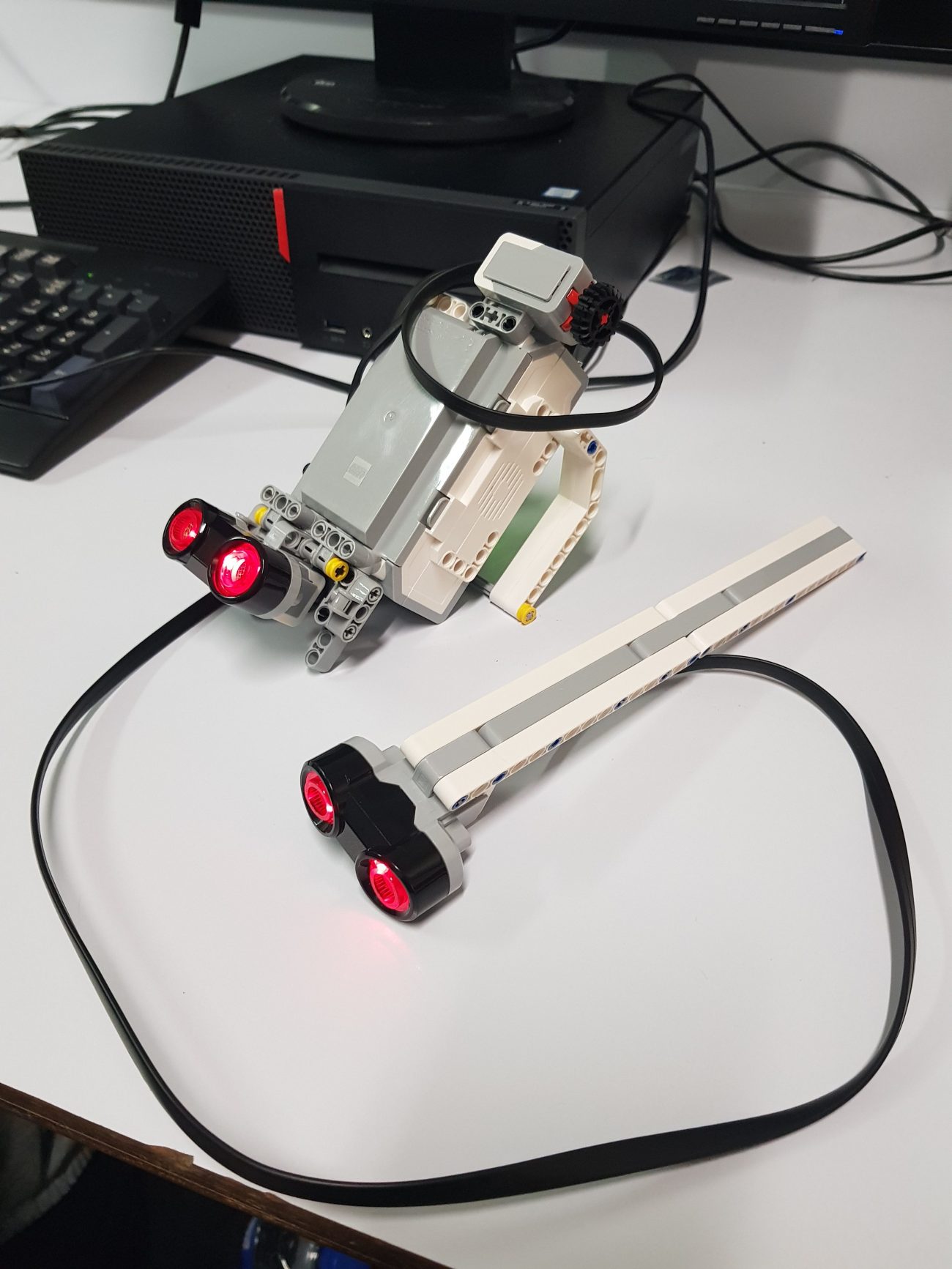
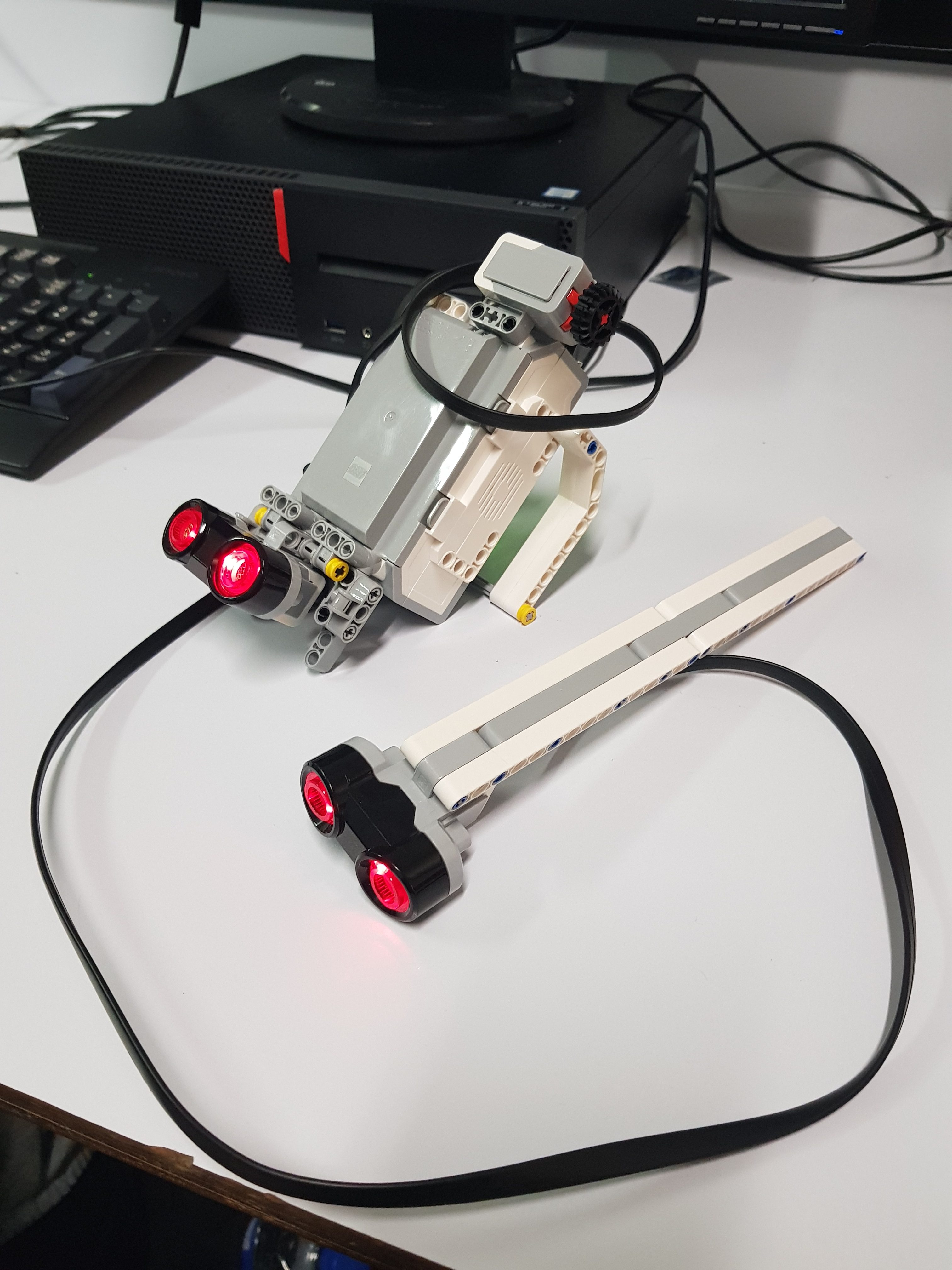
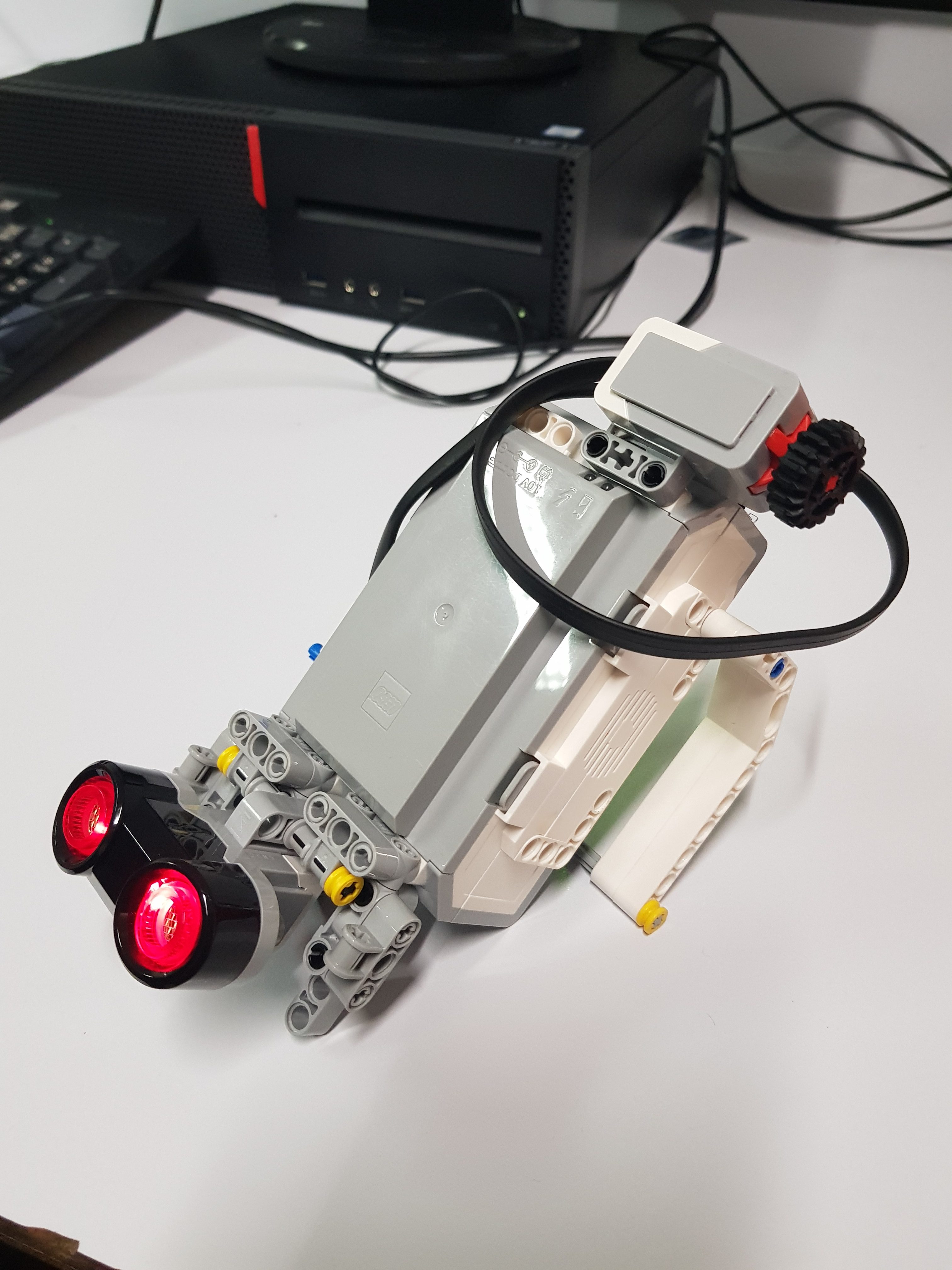
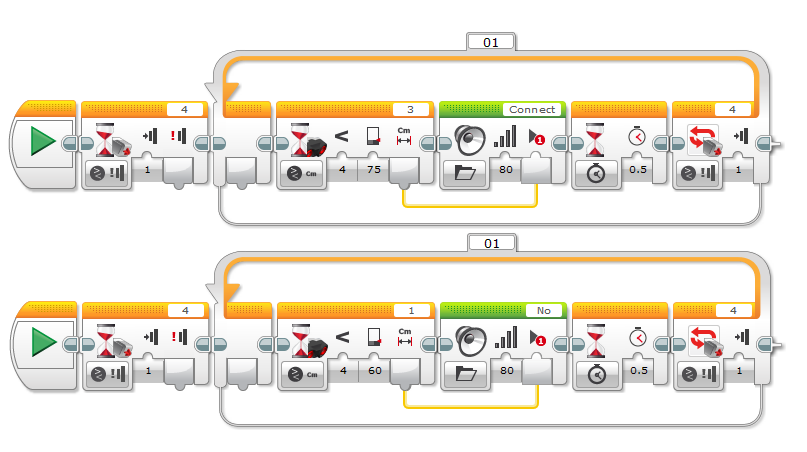
Our assistive device is a wearable robot that you could use to help you navigate around an area despite whatever reason you might not be able to see. The device uses the ultrasonic sensor to tell how far away something is in front of you, and beeps when you get too close. The device also has a sensor at the end of a wand that you can point around, which provides a different sound when its too close.
The reason we chose to do this device is that we believe that being blind is one of the worst disabilities that you can have, and anything that can help you even slightly, is an amazing thing.
The device was very easy to build and simple to use, but with the limitations of the hardware it sometimes struggles in cluttered areas. However, in places like hallways the device works very well. Testing was done by navigating through the hallways at the college with eyes fully closed and it was successful. An issue with the device, is that a blind person might have trouble putting the device on and operating it, if it was a real product, it would need to be very simple, and a lot smaller.
As it is such a simple device, I don’t think there are too many things we could have done, given we had more time, aside from tweaking some of the values that trigger the sounds from the device, and making it easier to operate blind.
This project is essentially a development of a robot we made last year, which started off as a game where you would be blindfolded, and had to aim a gun around until it started to shake. This was not possible, due to the limitations of the colour sensor, so we instead made it into something of an assistive device, that would shake when you got too close to things you aimed it at. Due to its size and that you had to hold it out in front of you, it wasn’t particularly practical.

Team members – Connor and Daniel