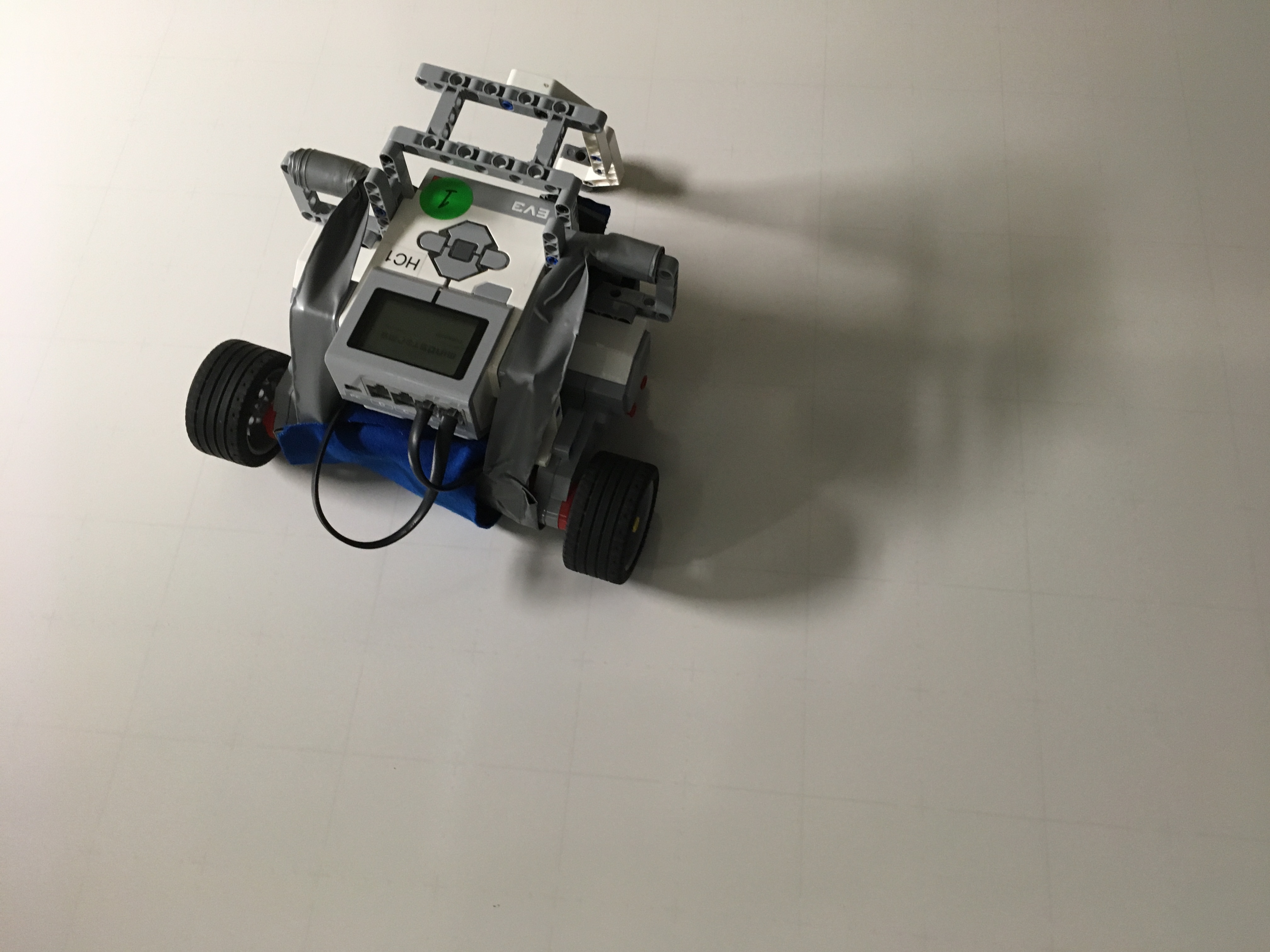
Our robot is designed to help teachers, and other whiteboard users, to automatically clear a whiteboard of writing. Using magnets to hold the EV3 brick up, the robot is able to effortlessly glide across vertical surfaces and uses felt along the bottom to erase the whiteboard marker.
INSPIRATION
Xavier said, “Ooh… maybe we should do a whiteboard wiper.”
“No, that’s dumb,” said Jack, “we should do a Whiteboard WischerTM”
“Alright,” said Matthew.
PROCESS
We started the project by brainstorming ideas and solutions on a provided document. We designed a robot and got to work recreating it with LEGO and the EV3 brick.
Our initial prototype was a brick atop wheels with a bumper on the bottom which pushed the wiping device along the whiteboard.
We ran into a problem when trying to get the robot to climb up the vertical whiteboard. Using duct tape and magnets brought in by Xavier, we created a blanket that would stick the robot to the surface. Some complications arose from this design. We used so many magnets that the robot couldn’t be moved using the wheels, and the magnets were too tall and they stopped the wheels from reaching the whiteboard.
After realising our last design suffered from an over-abundance of magnets, we decided to scrap the blanket idea and start over. This time, we chose to strategically place the magnets in places that would allow the robot to not only stay on the whiteboard, but move around as well.
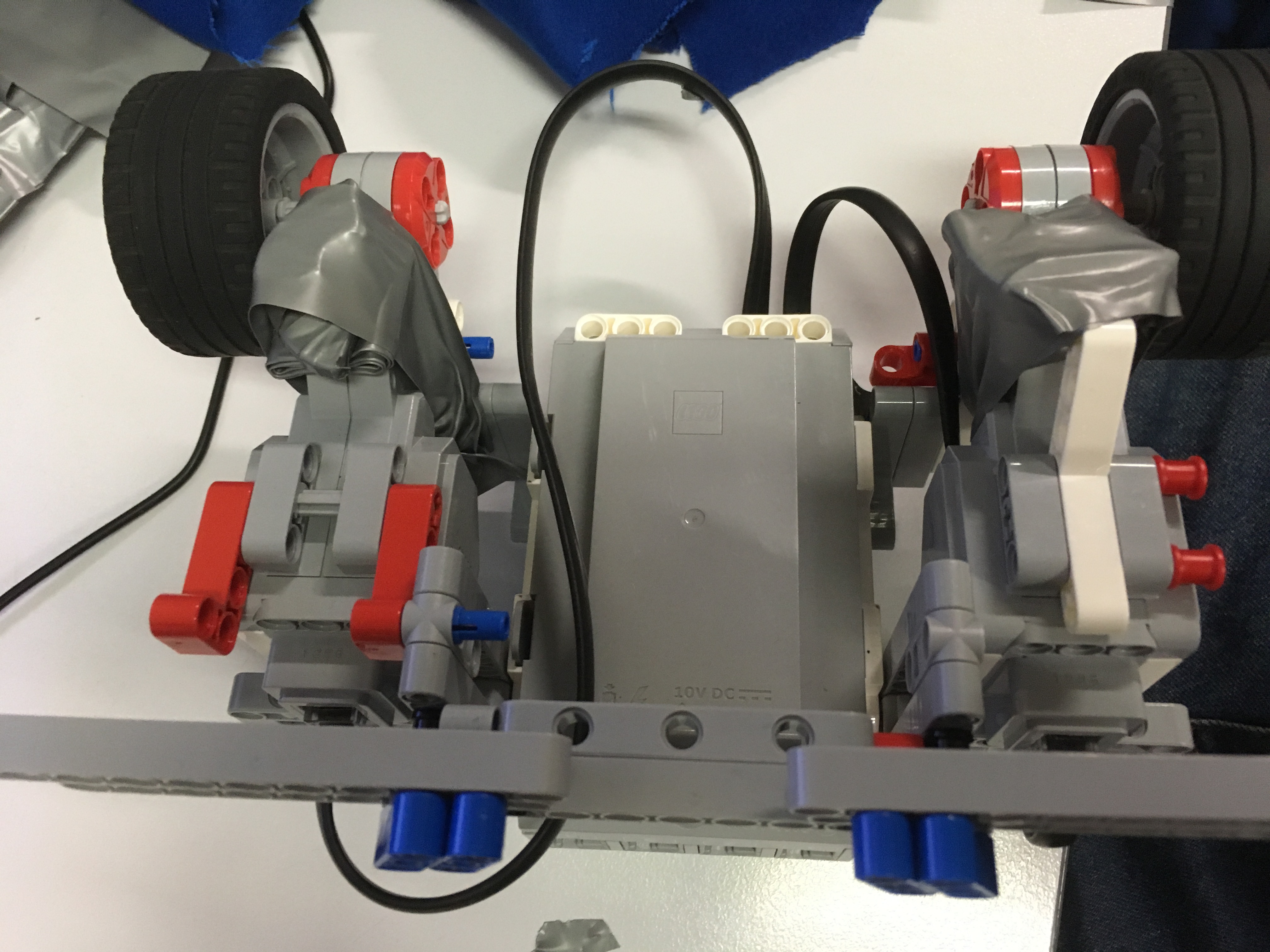
Placing two of the stronger magnets next to the wheels, the robot’s wheels would stay attached to the whiteboard, and could move around too. Everything was working swell, until the magnets decided to disrupt the peace again. One of the magnets was getting stuck to the whiteboard instead of hovering over it and this caused the robot to go up on an angle instead of driving sideways.
Next, we had to come up with a way to control the robot. There were two options; create a remote control, or automate the robot to move around the whiteboard. Obviously the second option was way cooler so we chose to try make an autonomous cleaning robot. We started by creating a simple program that moved the robot forward (creatively named ‘FORWARD’) and tested it on the whiteboard. The test was a success, so we moved on to harder programming.
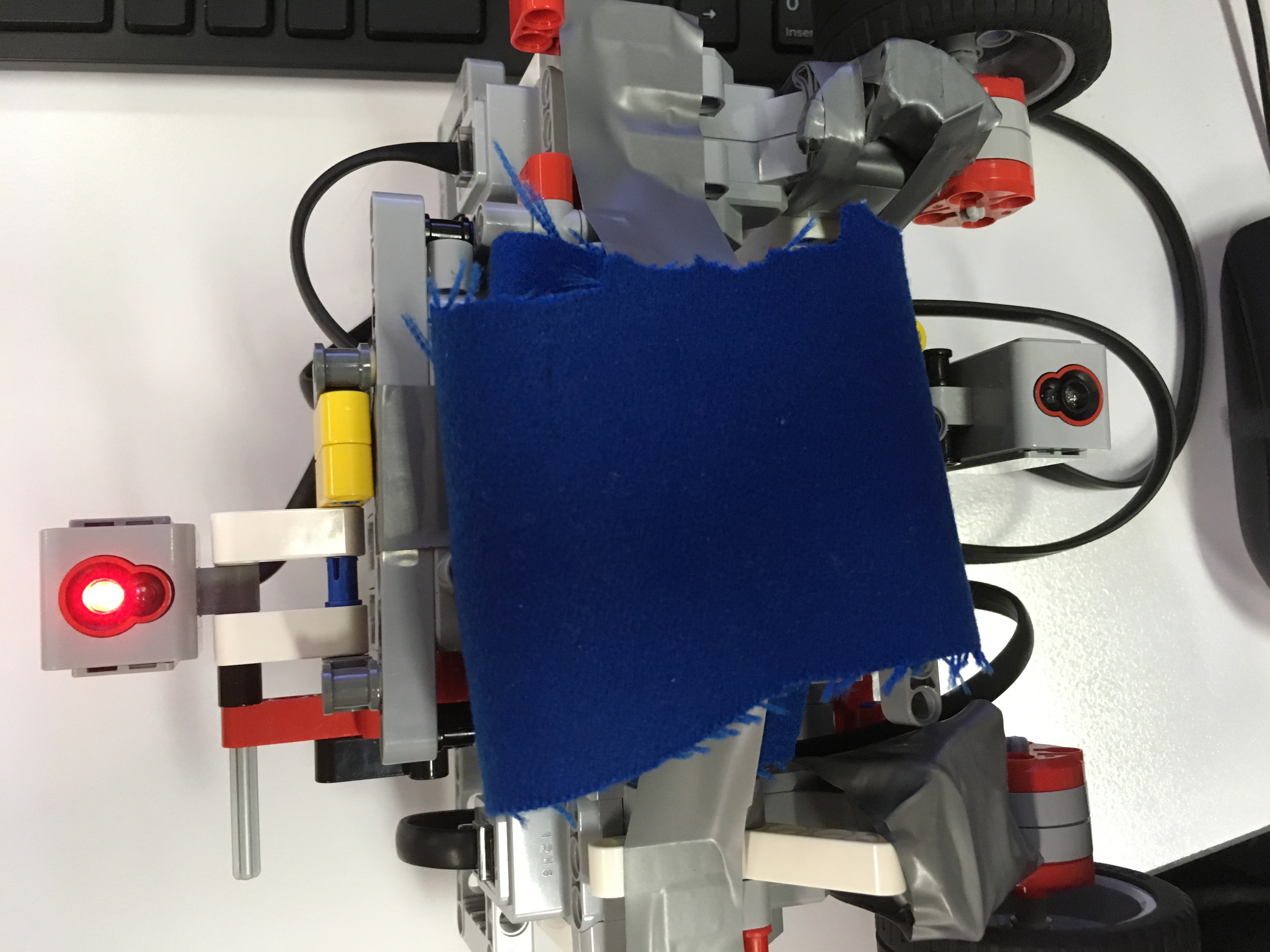
Using white reflective tape, we could use a light sensor to… sense the change of light. If taped around the outside of the whiteboard, the robot could tell where the edge is. We placed light sensors on the back and front.
Finally, we readjusted the magnets (again!), in order to place a proper wiper. We moved the magnets to the centre of the robot, and put felt over the top. The magnets pushed the felt on to the whiteboard allowing it to wipe instead of glide over the top.
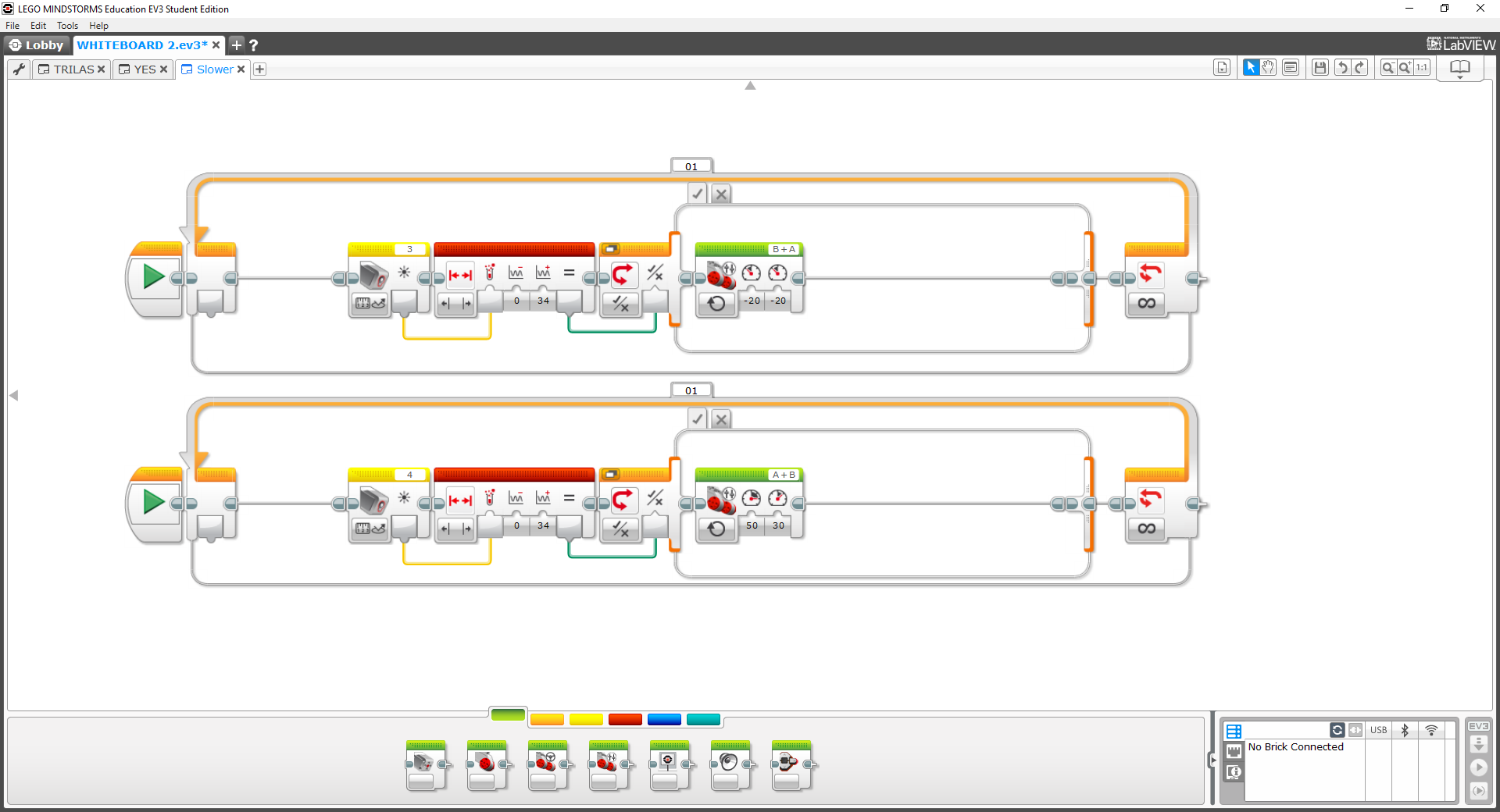
PROGRAM
Here is our final program (click on it for a larger picture)