The goal of this assignment was to create a robot out of Lego Mindstorms, the robot had to compete in a class sumo completion. The first tournament was for user-controlled robots and the second was for autonomous robots. Before we started building we decided to research what other designs looked like, no need to reinvent the wheel. We found this video where we quickly realised that a ramp was the way to go, and the lower the centre of mass the better the robot seemed to perform.
With our first robot we made sure to make a good ramp, and try and get the angle as low as possible whilst still making it secure, overall we were quite happy with the quality, but in the end, it ended up being a bit tall. In terms of programming, we didn’t need to do any with the normal software but we did experiment a lot with the controls on the EV3 app. We would have preferred to use simple buttons to control it but for some reason you couldn’t do this with the program so we had to use a joystick, it had a few delay issues, and was sometimes unresponsive and would lock in a position even when our hands were not touching the screen, this would cause the robot to drive out of bounds. If it weren’t for a bug in the semi-finals we would have had a chance at winning.

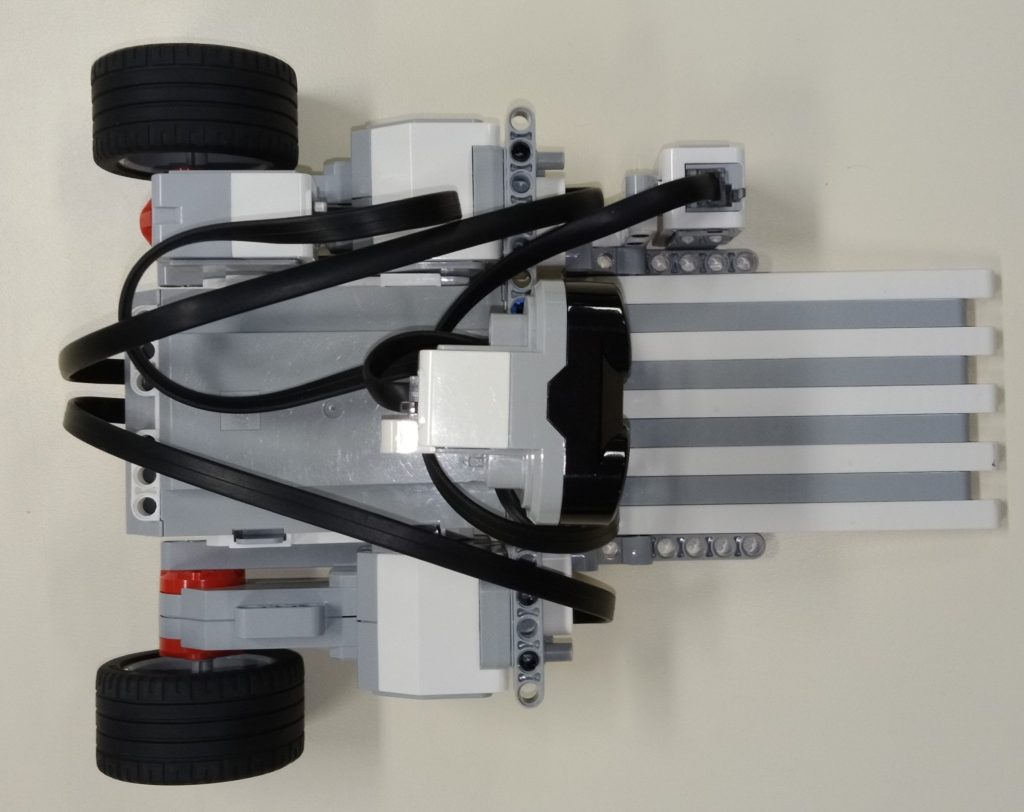
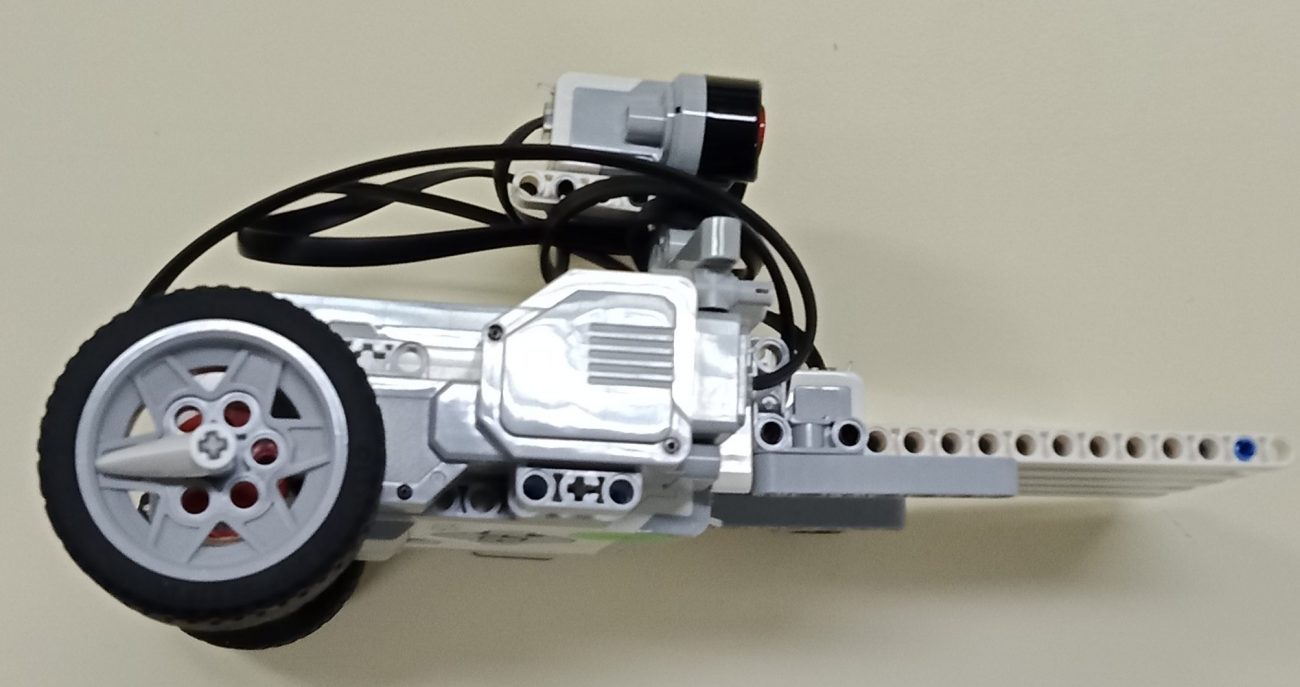
For our second robot we took inspiration from other designs which had the EV3 brick turned upside down, this allowed access to the buttons on the brick, which we needed, it also allowed us to make the robot overall smaller and lower to the ground, we also removed the small ball we had on the bottom of the first version of the robot as we didn’t need it to reduce the friction. We also didn’t need to put the ramp on an angle, instead, we just used the bottom of the ramp as the contact point for the front of the robot. This increased the overall build quality and stability, and it lowered the centre of mass. Throughout the competition, we did modify the ramp slightly but it didn’t make a difference so we reverted back to the original design in the end.
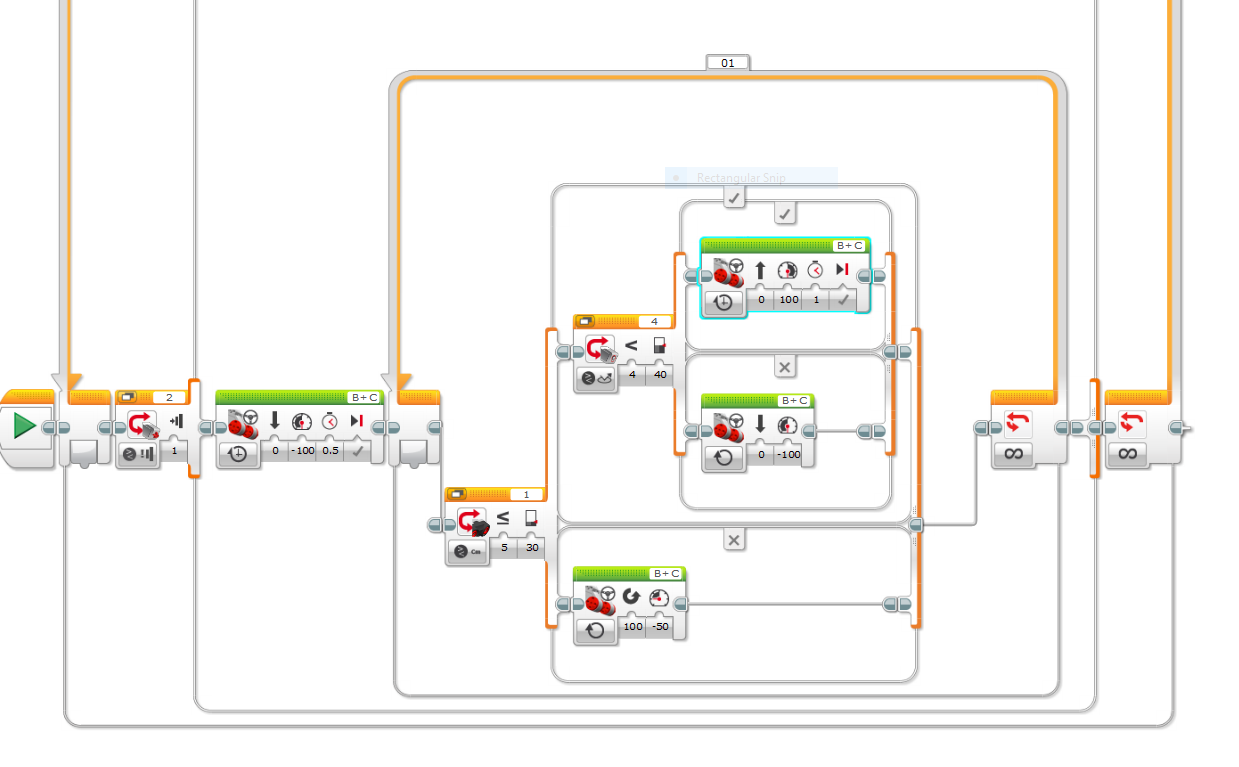
In the second competition we did need to make the robot autonomous, so we added sensors and a program. We used an UltraSonic sensor, for sensing the other robots, a colour sensor, for sensing the black line and a touch sensor, to make the program easier to start. For the program, I started off by just using lots of IF and Loops Blocks, overall all it was quite unclean and had issues with not turning smoothly and once it had seen other robot, it wouldn’t actually drive forward because of the order in which I had set up the sensor blocks in the program.
For the second version of the program, I found out that I didn’t need so many Loops and overall I cleaned up the program, I also added a charge to make sure it would push the other robots off the edge..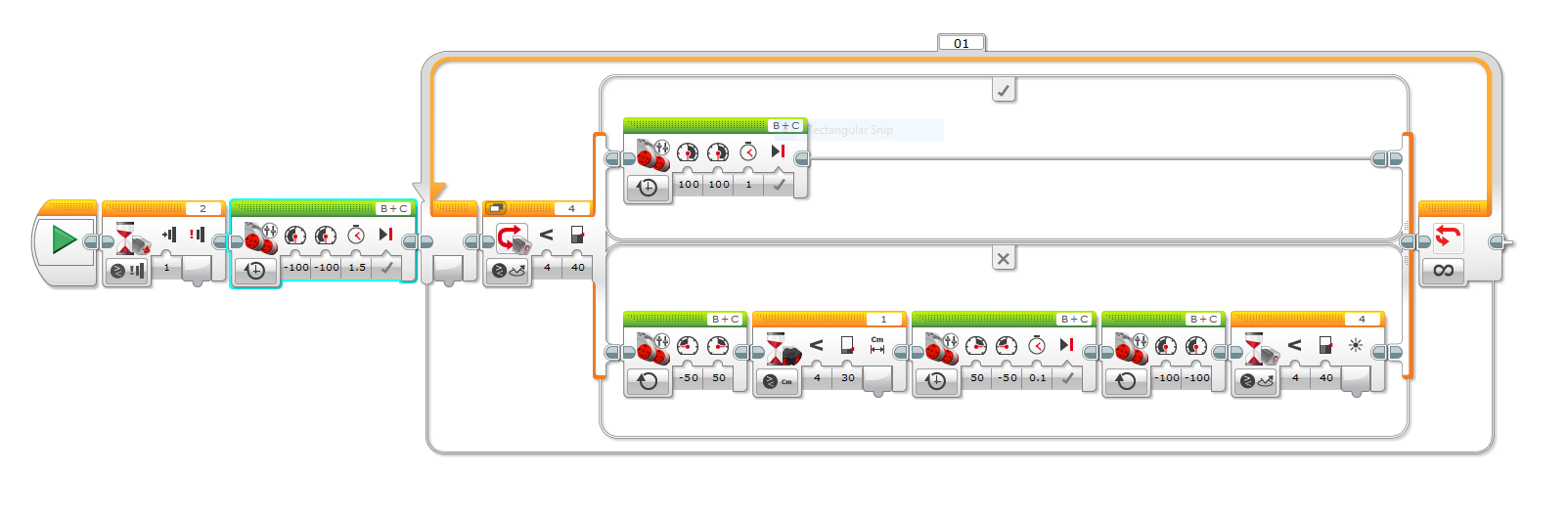 By Micah, Tom and Harry
By Micah, Tom and Harry