‘Colin’ is a final prototype sumo robot used in combat. Colin uses a colour sensor to detect the black lining around the edge of the ring to prevent itself from catapulting off the arena. In addition to the colour sensor, the robot also utilises an ultrasonic sensor which allows for minor adjustments within the programming to tweak minor tactics for matches. A touch sensor was the final addition to the frame created around the brick of the sumo, for the mere purpose of being to start simpler when against a time penalty in most matches, all of this was done with still having an intention to keep the machine as lightweight as possible.
The restrictions implicated on the sumos affected our robot greatly, having weighed in as one of the heaviest of the competitors at 726 grams, starting each match on at least a one second deficit derailed our plans entirely and weren’t able to fight back in any games.
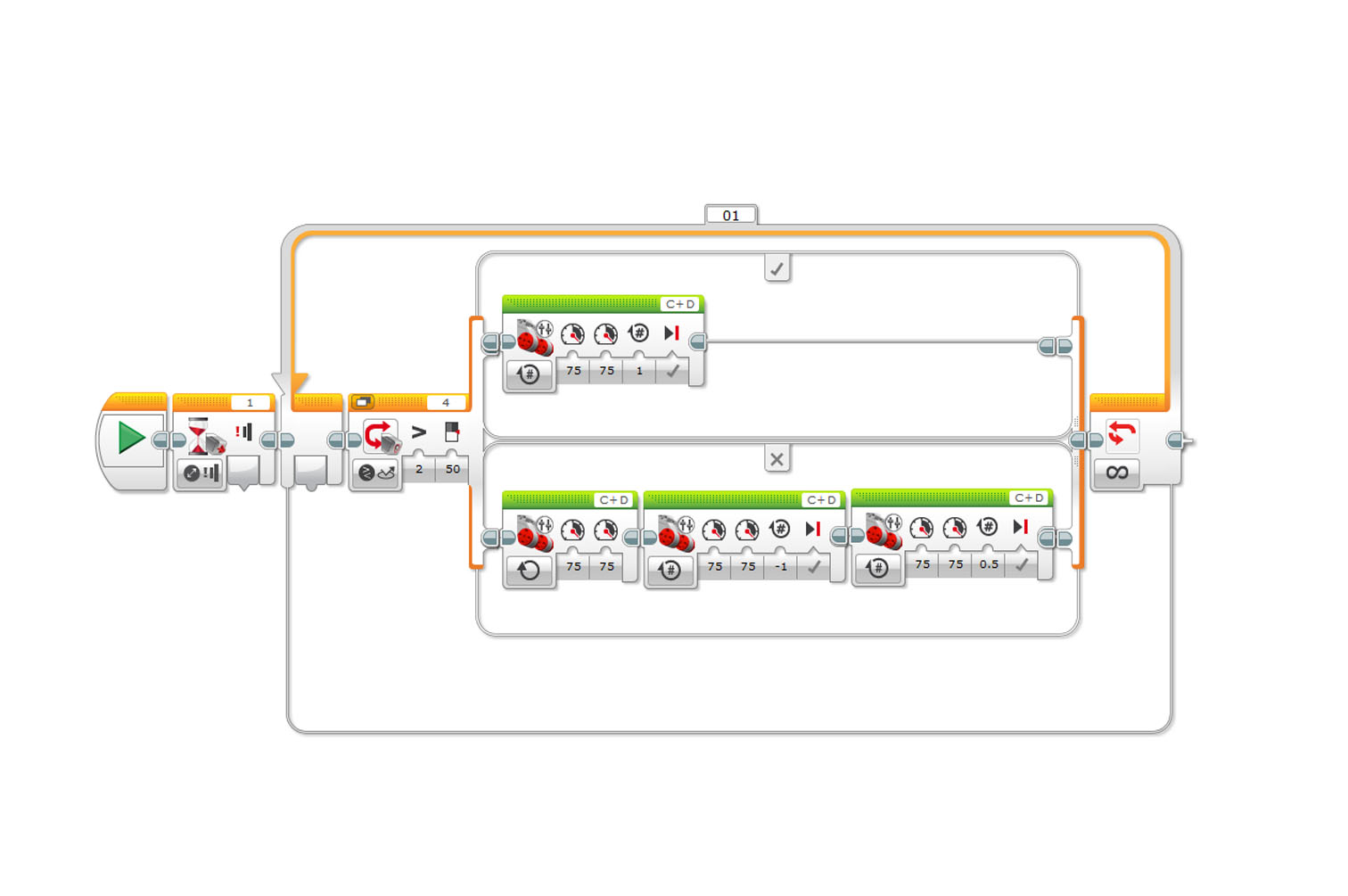
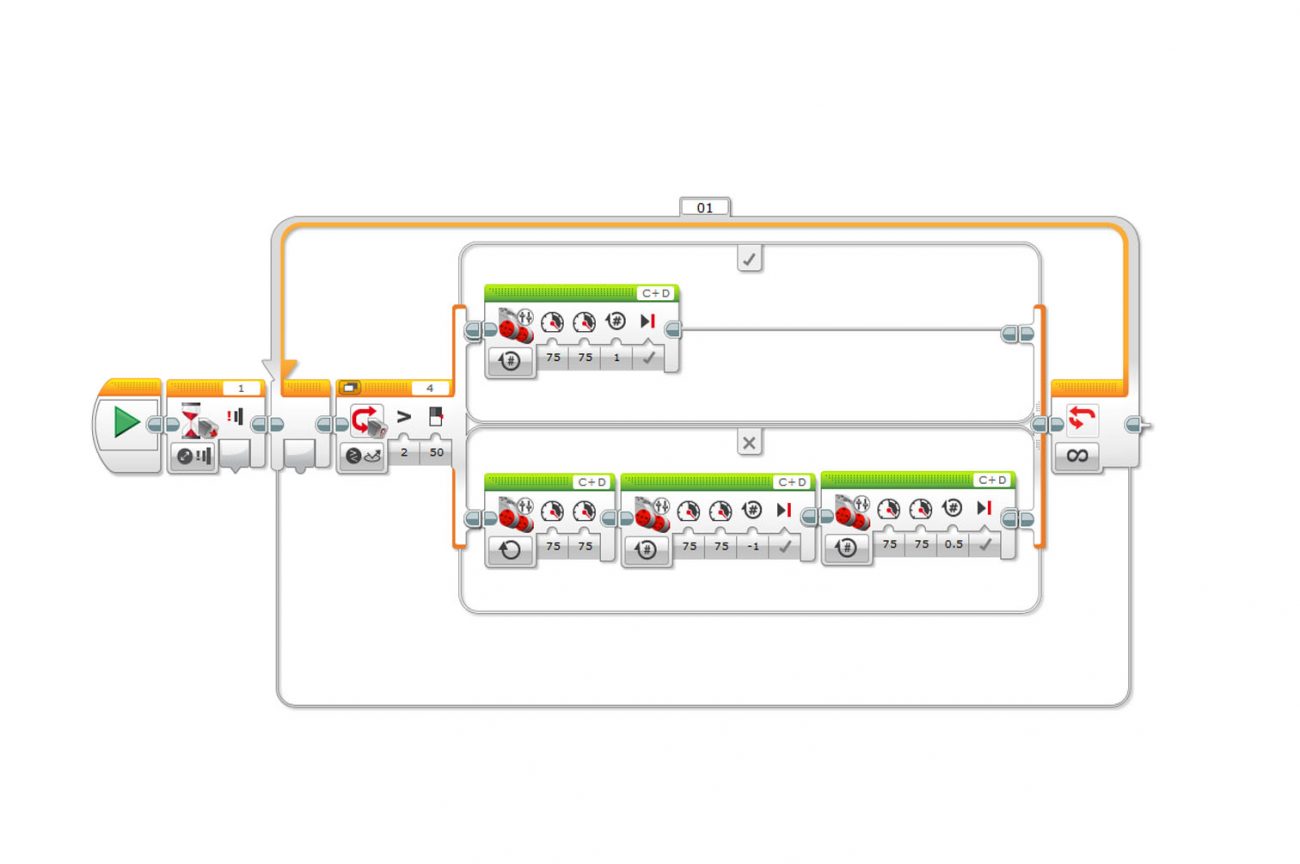
In regard to programming, the design was kept simple, only focusing on using the ultrasonic and colour sensors to guide the robot around the arena, I believe that despite our poor results in matches (0-5, not winning a match) we were not as far off from success as the score shows, our threshold for our colour sensor picking up the reflected light was not set to the correct number giving the wayward directions to the brick.