
Our challenge was to design a remote controlled or automatic robot that could get around an obstacle. We choose to build a robot that could autonomously get around the obstacle.
The robot does not work for a two main reasons.
- The robot is not well designed for this particular challenge
- The code is complicated and can have many thing go wrong with it
Robot Design versions
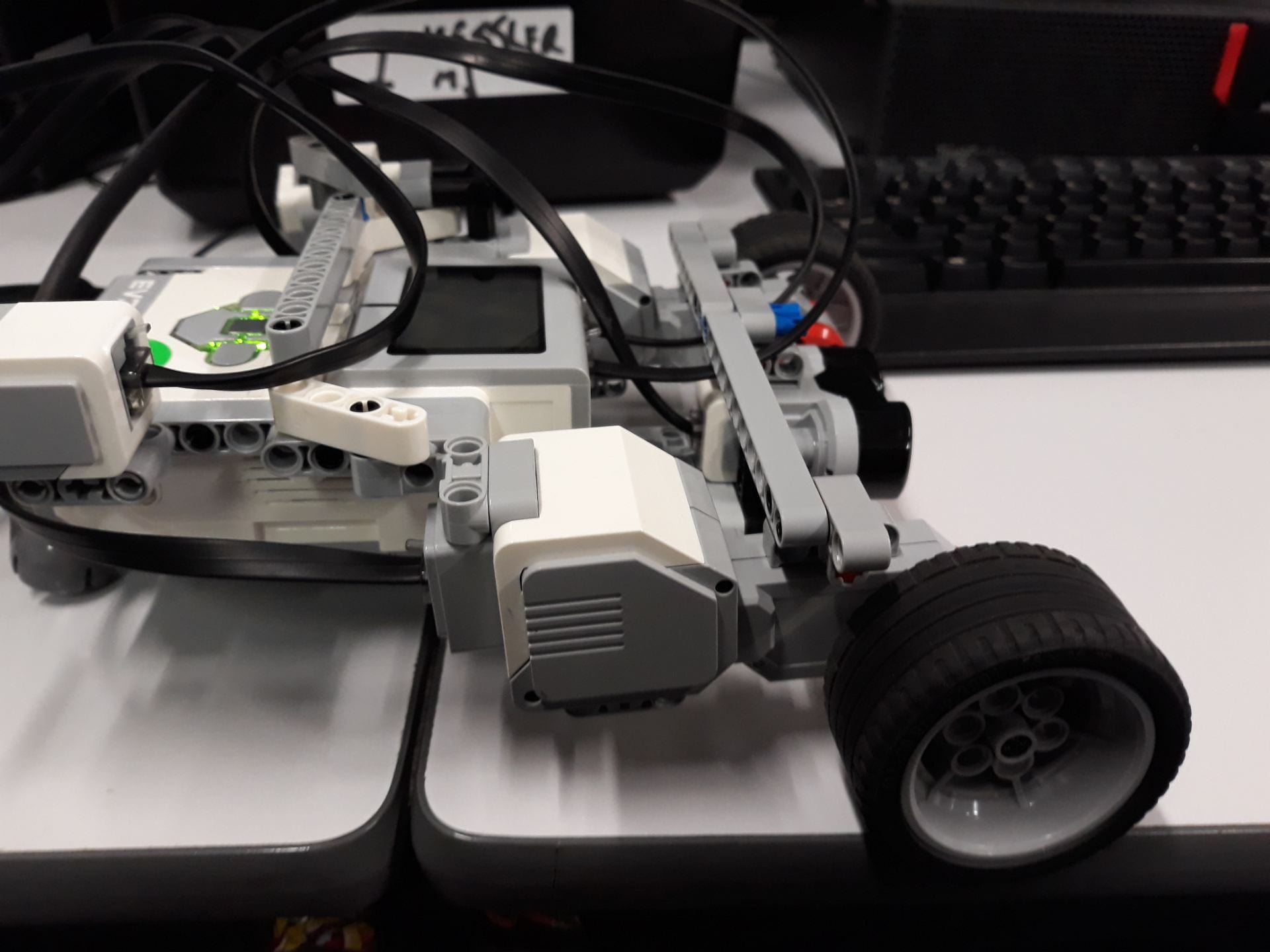
The the first version of the robot did not have the ultrasonic sensor and light sensor. Instead used a touch sensor to detect the edge of the table and turn away this ultimately did not work as constant pressure could not be maintained .
The second version replaced the touch sensor with instead a light sensor. The light sensor did work and is could avoid driving off the edge of an table but the robot still had no ability to detect the obstacle and drive around it.
The third and final design version re added the touch sensor as a way to easily start the program. It also added the ultrasonic sensor to allow it to detect the obstacle and avoid it.
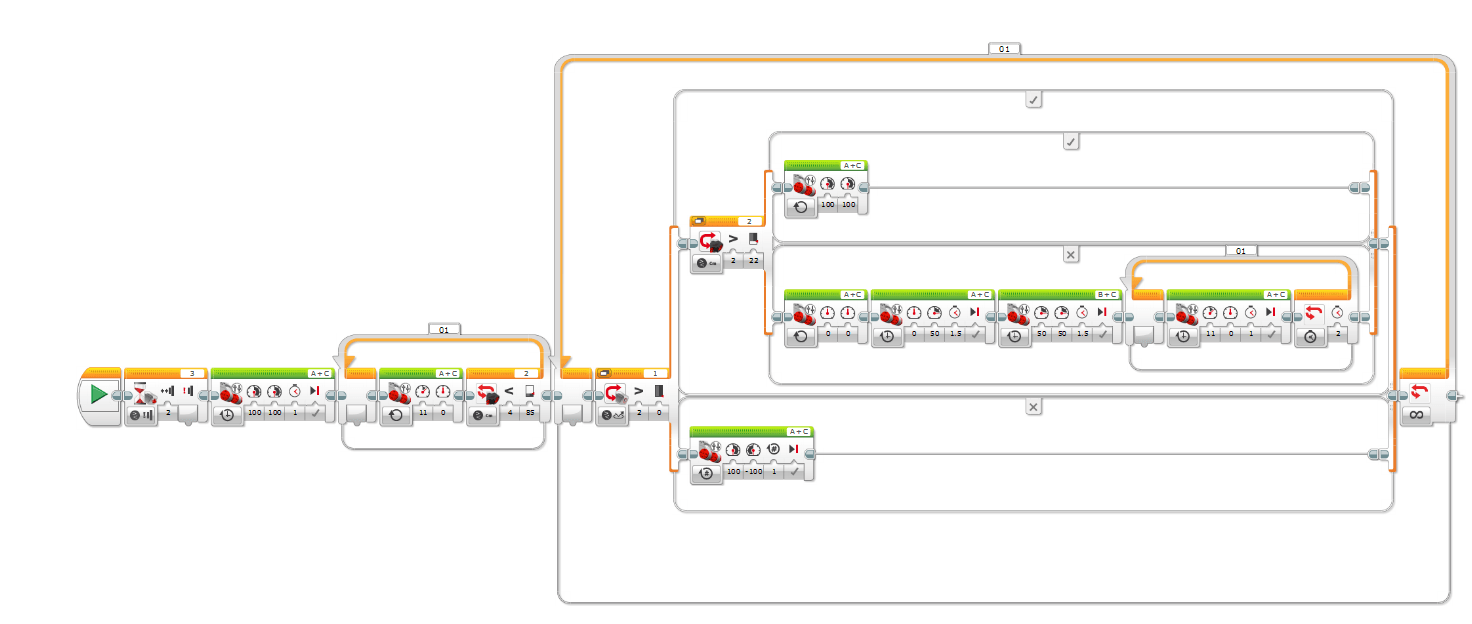
Code Design Versions
The code did not change a huge much as i only started coding when the final design on the robot was complete this limited the amount of time i had to test the code and work out the the design would have worked far better if it was remote controlled.
Looking back on the project i should have tried to keep the robot and code as simply as possible for the course to reduce the chances of errors forming in the code or design. And if i had more time i could have prototype a bit more and sooner relies the robot design was far more suited to remote controlled than automatic. In future need to edit myself and try and keep it as simple as possible.
Project by Kessler and MJ