In this challenge the goal was to circle around an obstacle in the middle of the table while starting and finishing in the appropriate boxes. This could be achieved by either autonomous movement or remote control.
The robot is capable of both autonomous movement and remote control.
{kind=link}
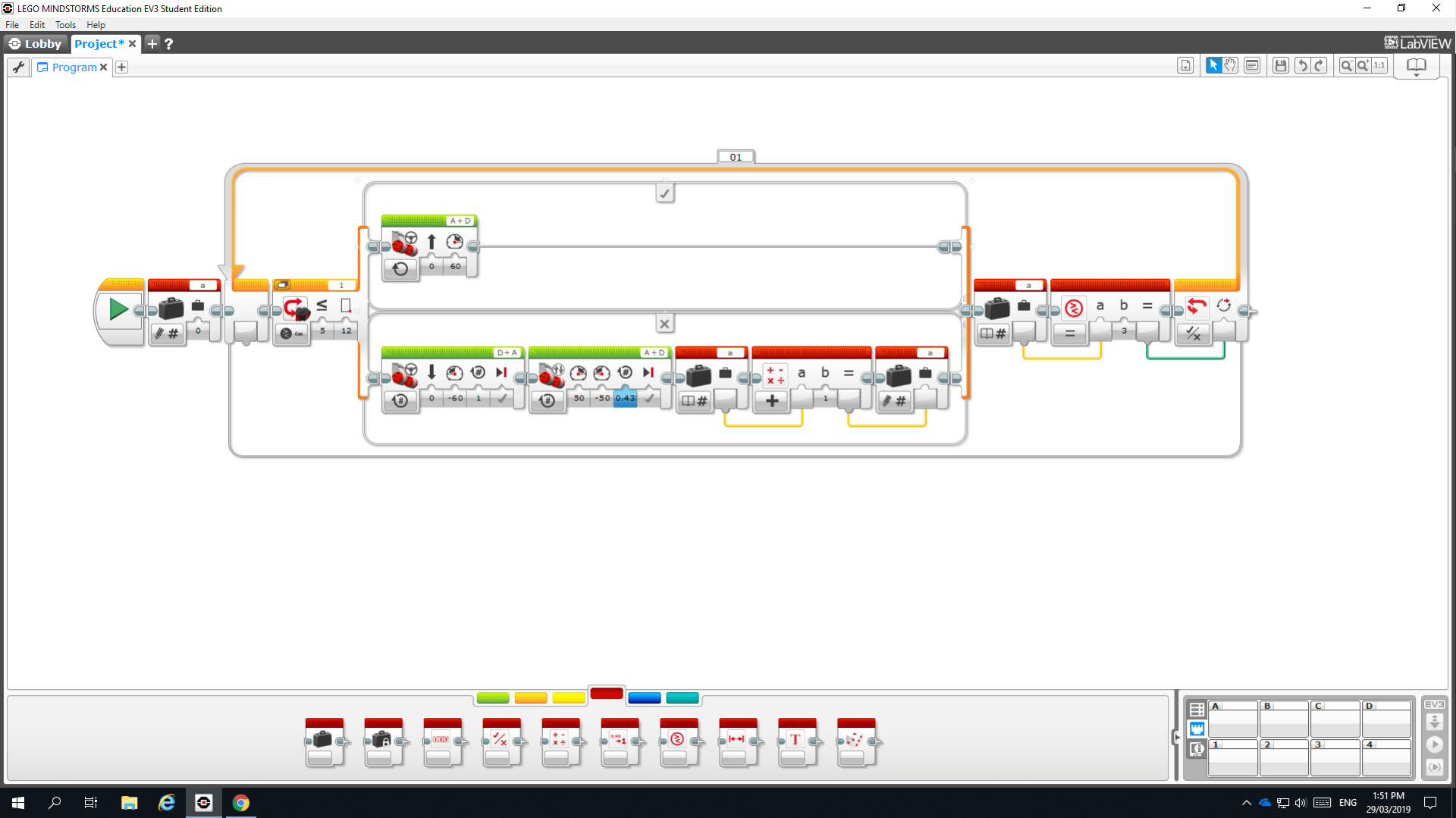
The autonomous movement is it secondary function. written at the last minute completely from scratch there were only a handful of tests. One of the problems identified in these tests was how it would know to stop after i reached the end, with such little time to do anything we could not implement a dedicated sensor to identifying the end box. So the work around was a variable to count how many times it turn and after the third time stop as to finish in the box. There is a remaining problem in that the ultra sonic sensor is not always reliable, this may be due to a hardware problem or and unidentified error in the code.
The remote control robot worked off Bluetooth with another robot. The remote control used two levers hooked up to motor to control power of the robots motors based on the degrees of the levers. The degrees are times by two to get the power for the motors. We original used wheels on the control but it was to hard to control due to poor design and us being bad divers.
The design of the robot was ramshackle and somewhat flimsy. This is fine if the robot does not fall and shatter into am million pieces or accelerate to fast fall apart, both of which happened twice.
students: Tom, Miley and Dylan