The task was to make a robot/machine that can go up and down the table making a U-turn around an object at the top, so I thought I would be unique and make a remote controlled car. The idea was that the car copied the controller exactly, in other words it was mimicking it.
Prototypes: The first car we had was the basic car in the instructions, but due to some technical difficulties, the car we had was torn apart by my partner and I was left with the scraps of it. We did manage to fix it though so that’s good. Other than that the prototype worked that good that we just rolled with it. The controller had the joystick thing a little bit lower and I kept on accidentally pressing buttons so we changed it (moved the parts upwards a little). We also tried a 1 – 3 ratio for the wheel (controller to vehicle) and it was good but turning was a pain so we left it at 1 – 1.
Outcome: It worked. The outcome was great. I am not the best at driving it but with a little bit of practice you could do it easily.
Future Plans: We added buttons/touch sensors to it to make breaks but we ran out of time. Just saying if I had brakes than I would be slightly better at driving it. I noticed that the gap difference between the vehicle and controller, the spinning on the controller was affecting the movement, so if we had more time I would have added a wider vehicle wheel gap to make up for it. another thing I would add is for when it is moving it plays “Gas Gas Gas” by Manuel and plays “Deja Vu” by Initial D when turning.
Video/Pictures:
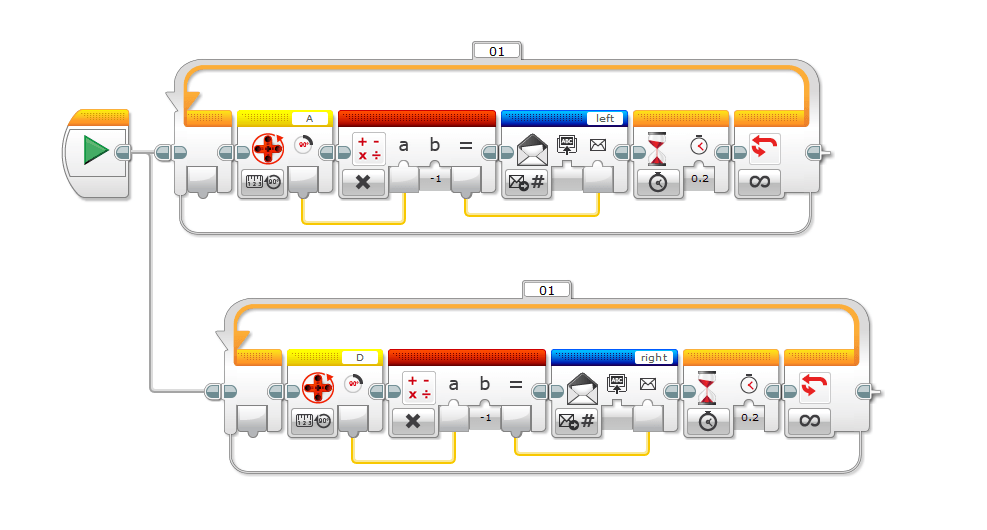
– Master (Controller)
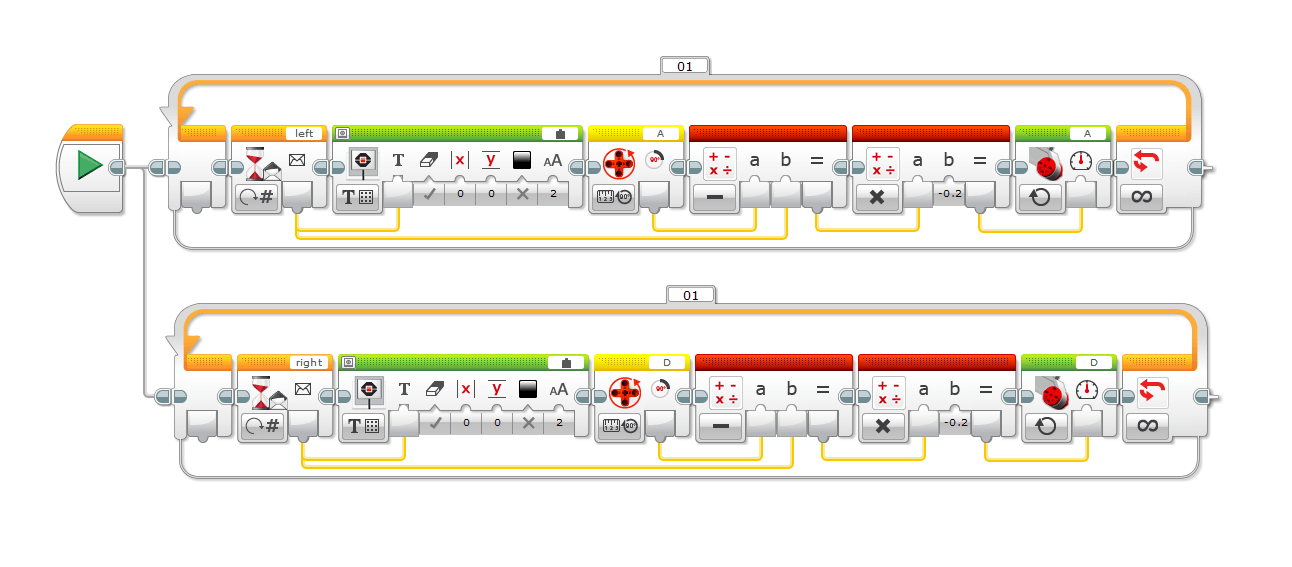
 – Slave (Car/Vehicle)
– Slave (Car/Vehicle)
– Footage of Them in Use
By Harrison, Lucas and Tyson