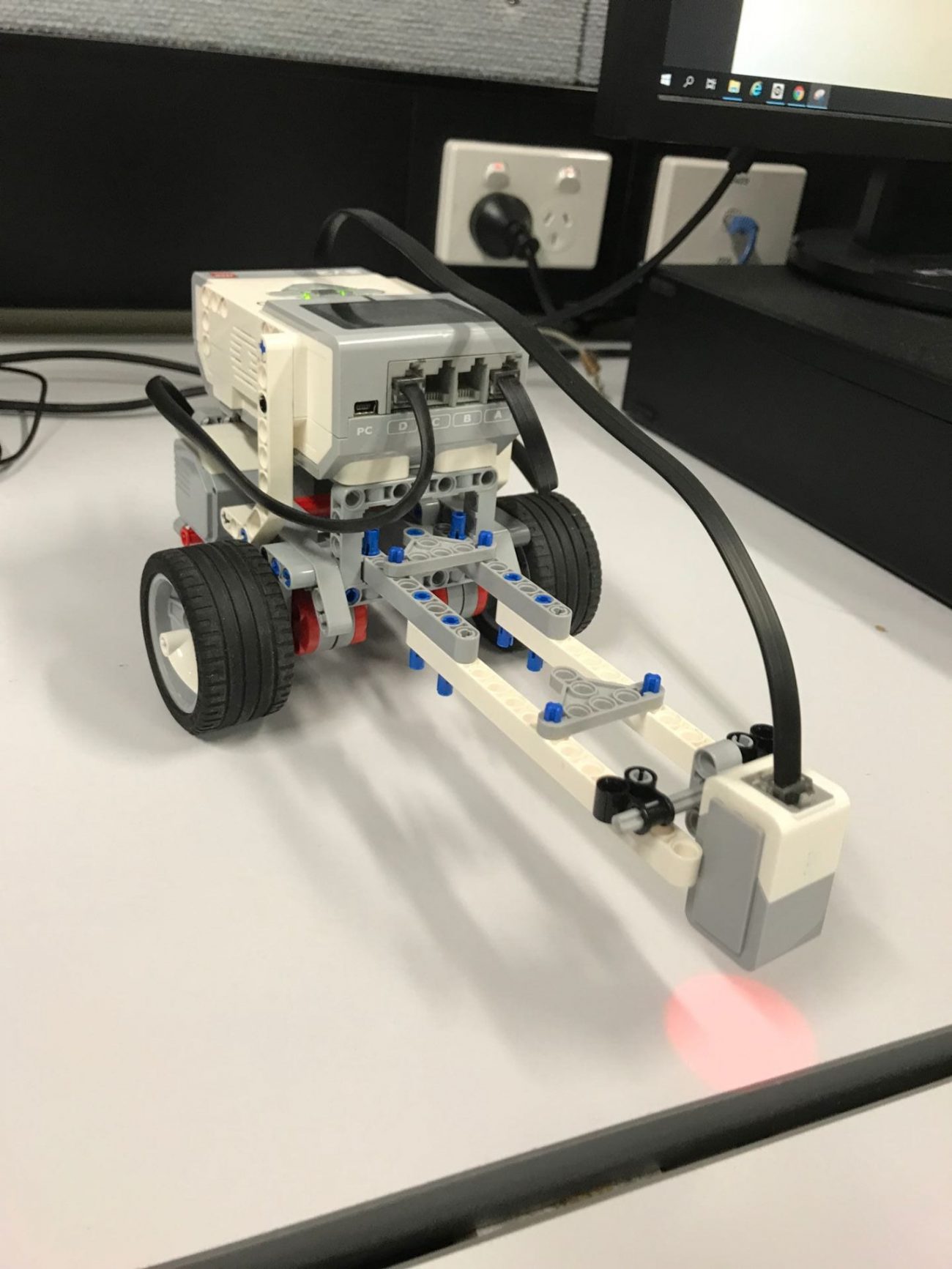
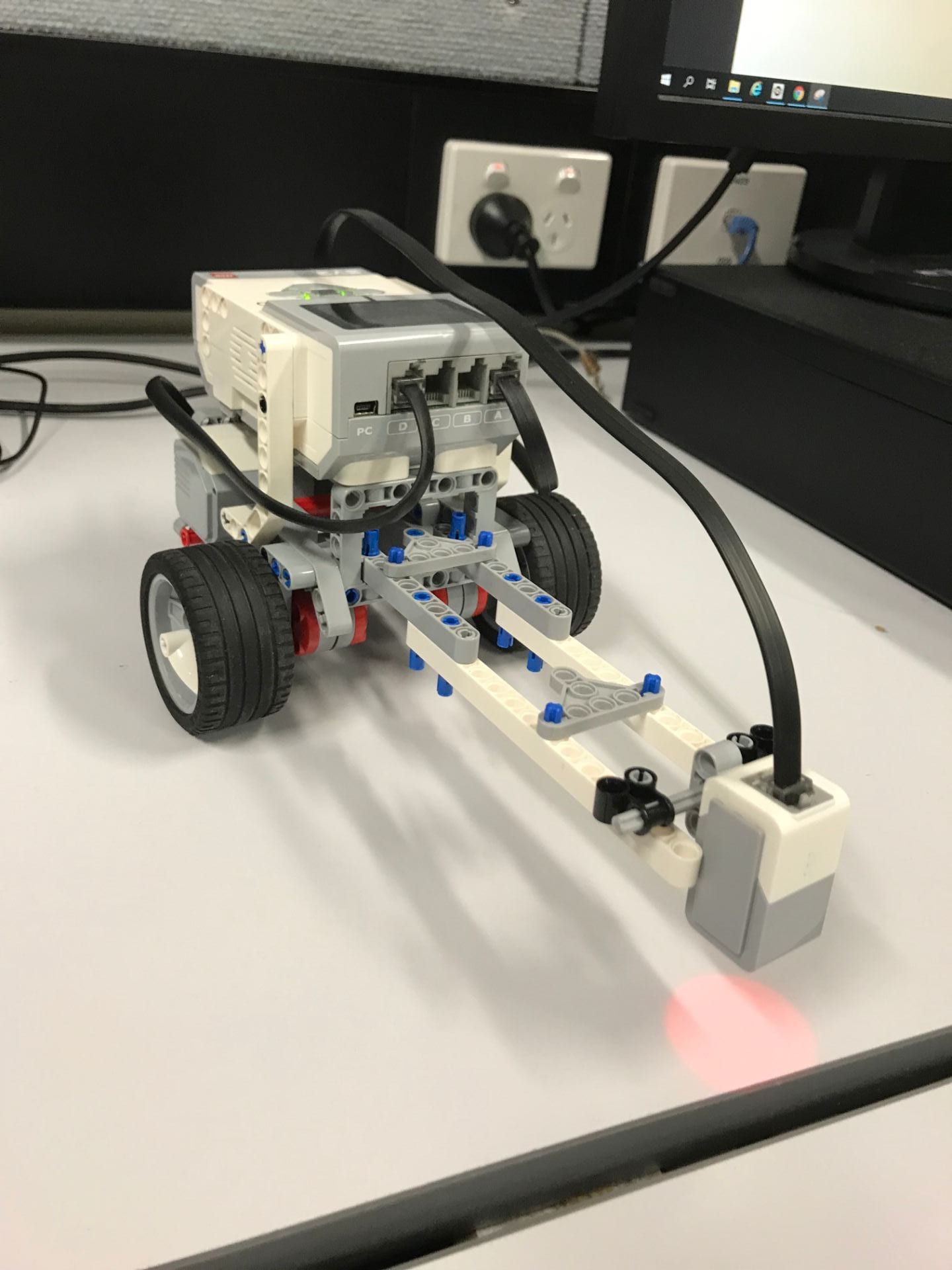
We designed and constructed this robot, to partake and complete the obstacle course project.
Challenge
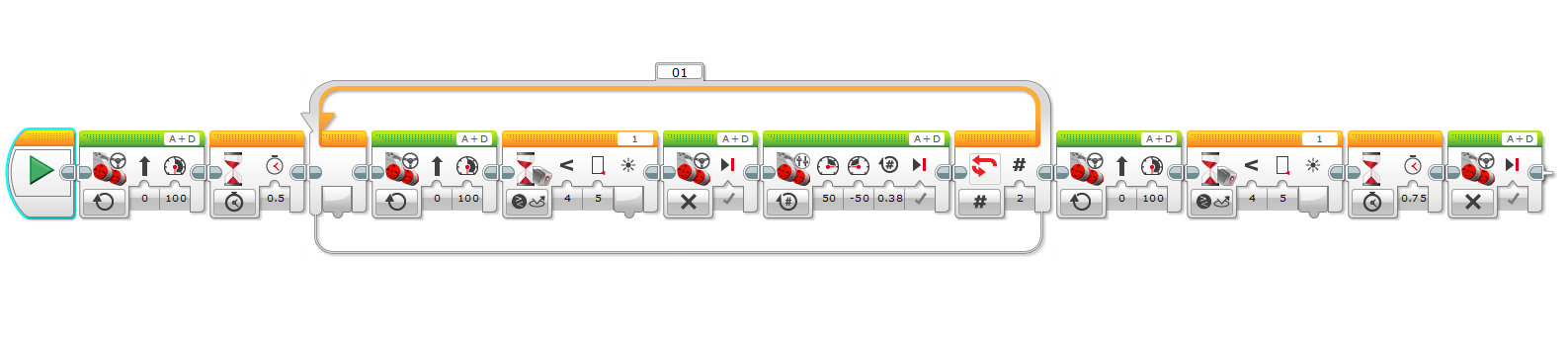
Program your robot to run an obstacle course in the fastest time
This challenge introduces the following concepts
- Autonomous v remote control
- reliability and repeat ability
- Bluetooth? (intermediate – requires some additional knowledge)
Robot Performance
Autonomous – One point for each
- Robot uses sensors to dive around the obstacle and back to the start, without failing, or falling of the edge.
- Easy to use and reliable
- Fastest autonomous robot or does something equally amazing.
Design
We knew from the beginning we needed the robot to have a extended neck to easily detect darkness or light, and to also give robot wheels time to turn. Ball at the back to make turning easier, because then it doesn’t have to carry the back wheels.
Video