This past week’s challenge was to make a sumo robot that was good enough to win a competition at lunch in a free for all between both robotics classes combined.
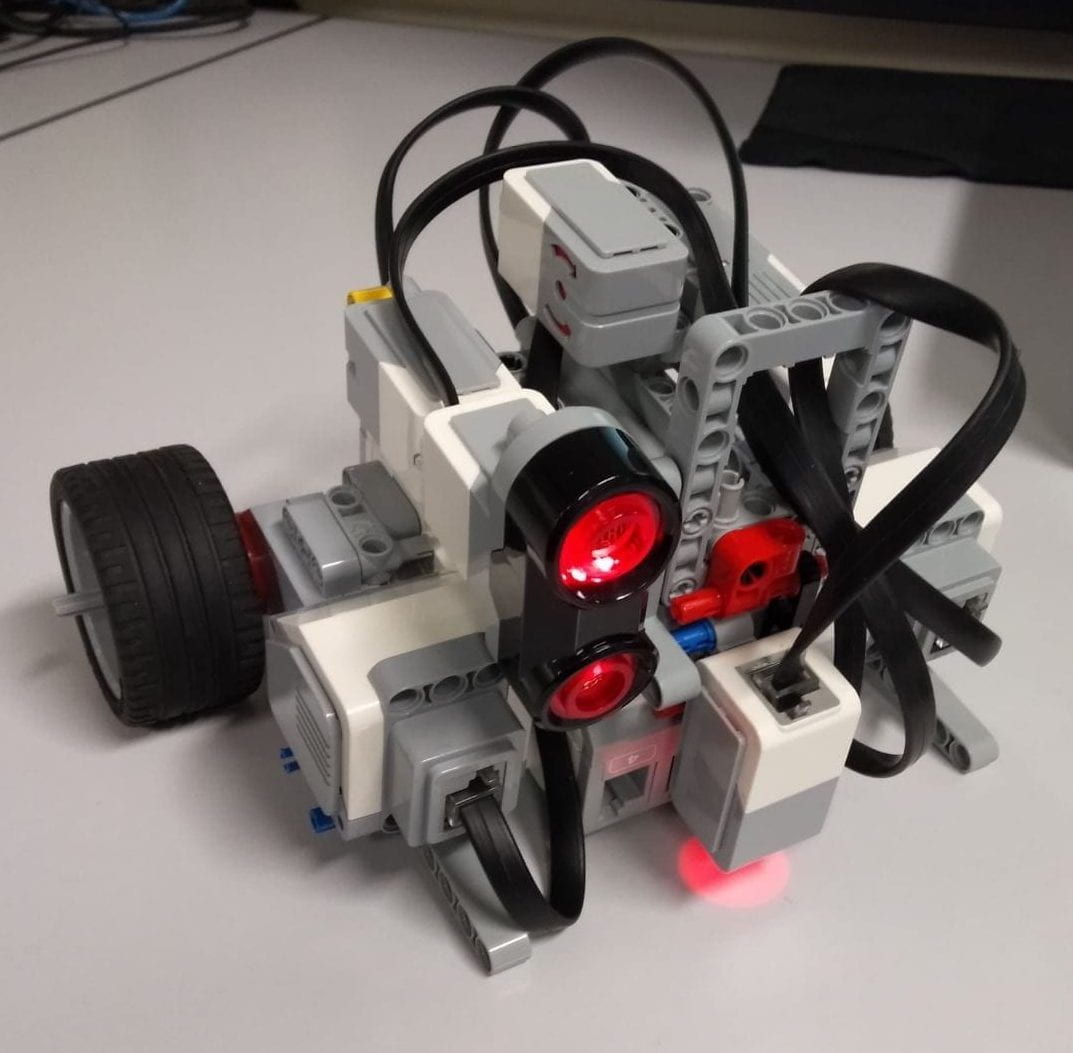
For our robot we wanted to go for a simple approach, so we didn’t add any big weapons or anything fancy. We decided to make it very low, but wide. It means the robot had a very low centre of gravity which made it very difficult to move and tip over. We made the robot only with two wheels at the back to make it rear wheel driving which gives it a mechanical advantage when pushing.
Brainstorming
Some brainstorming ideas were
- Whether to have the brick facing up or down
- Whether to have the robot low profile
- To have a swivel wheel, a ball bearing or no wheels at all
- Ways to detect things such as, light or touch (We chose both)
- Whether gears were worth it, but they weren’t strong enough to support the build
- Wheel protection
- The overall size and weight
- Cable management
- The speed at which the robot moved

Prototypes
Although we did make prototypes we didn’t think to take photos at the time.
- The first prototype featured gears, this robot was quite weak, the wheels weren’t attached correctly, the size didn’t meet requirements and the sensors couldn’t be placed anywhere that was easy enough to manage. This robot didn’t have a program and so we scrapped this design very early on.
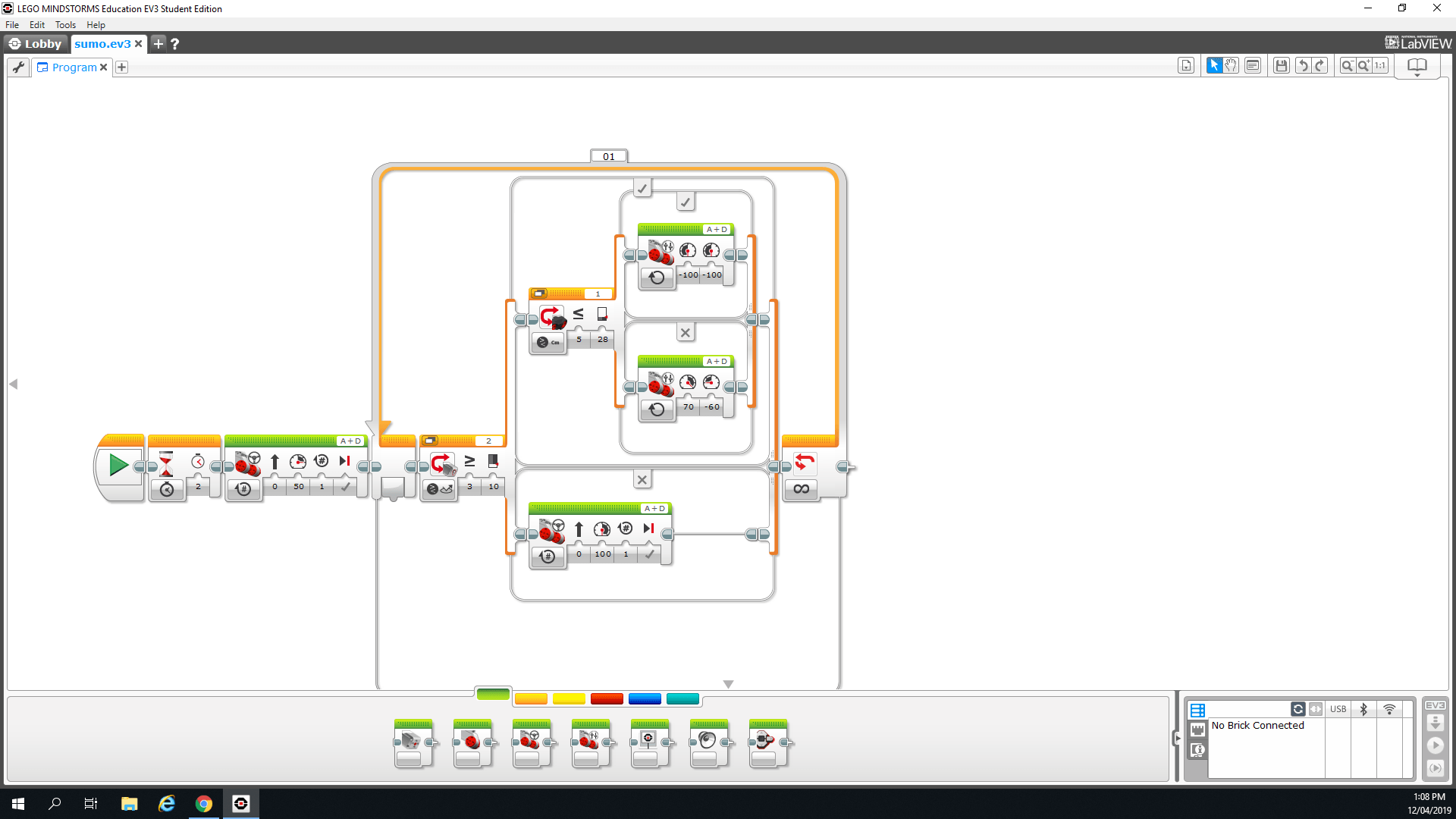
- This robot was our second design which we made smaller and got rid of the gears, it fit the requirements tightly and didn’t have the most complicated and thought out programming. It only had an ultra-sonic sensor which means it quite easily lost control and drove off the arena. Our programming will be featured below. We went in three battles and we lost two due to the robot driving off the edge.
- Our third prototype is very similar to the model we used in the matches at lunch. It had mainly the same build, minus the extra parts to add weight, we added cable management in this build and made gave it a colour sensor to help it navigate around the arena and not drive out. The wheels were slightly weaker in this design, which we fixed for the final battle. Another improvement was the finished programming which made our robot an overall improved machine in all aspects.
Results
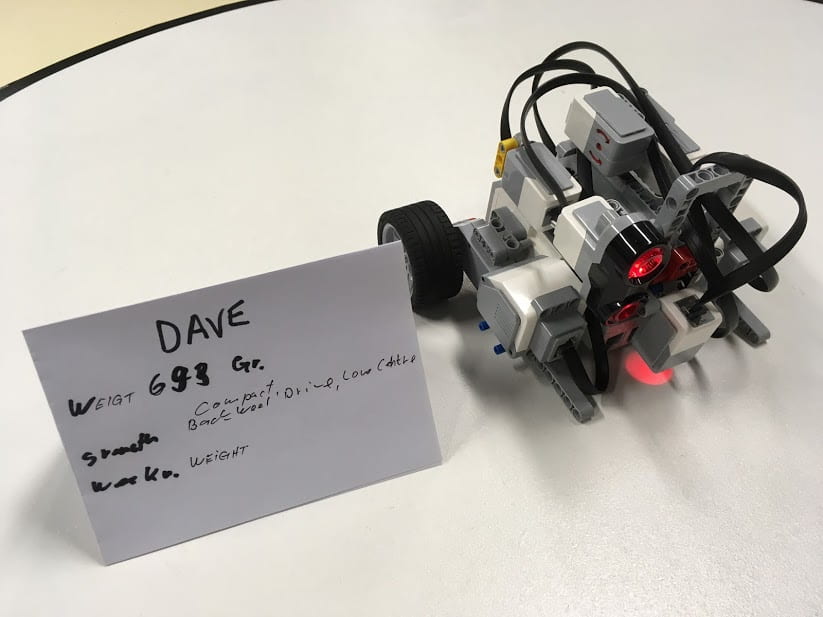
The competition overall went quite well, with the final design of our great machine, Dave, an improvement on all previous prototypes. With our mechanical advantage allowing us to push all other robots in a head to head, and light weight allowing for greater agility than our opponents. Our robot coming second in the class and third overall. Only losing one battle, which happened to be to the victors of the tournament.
If we had more time and maybe knew the competition a little better we could’ve reflected this by making adjustments, such as adding wheel protection and a defence to ramps.
Our team could have done better maybe if we had a greater degree of team coordination, however our time management was much better. There wasn’t a moment when you could find all team members distracted.

-Tom and Dylan