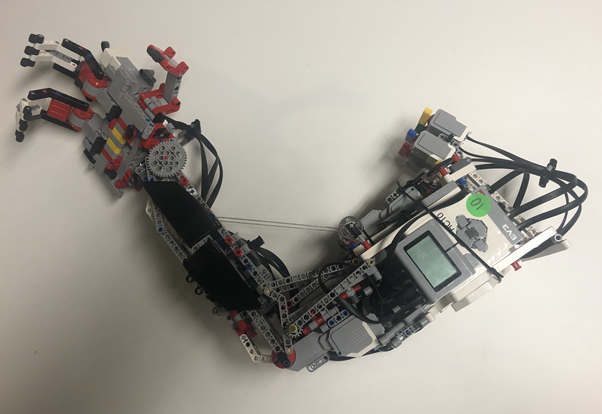
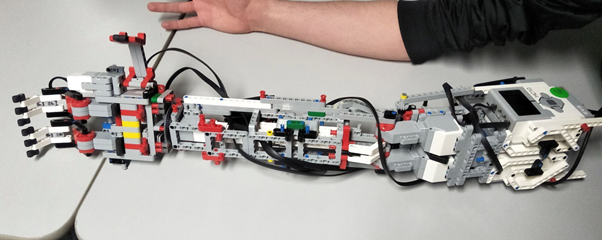
ARMageddon was initially proposed as a bionic arm to assist people with disabilities to continue to be able to have two arms. During the construction, however, we decided to focus more on the mechanics and code of the arm to have it able to perform tasks rather than ensuring it was light and a valid replacement. The conclusion of this project is that if you used the same motor setup and code but used 3d printed components this arm would be a lot more usable. ARMageddon is capable of lifting cups, bottles and other objects while also having the ability to freely move the fingers to the grip required then lock them in place.
Some things we are especially proud of in this project are:
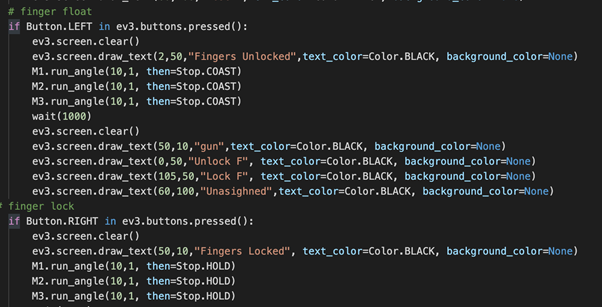
The Code: The person who did the coding had only limited experience coding in c++ from Arduino and were teaching themselves python on the bus trips in the mornings. A lot of the resources around using python for ev3 bricks is severely outdated so although the code may look overcomplicated to an experienced person it did its job.
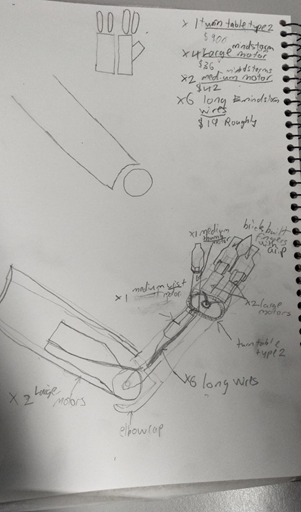
The Elbow: This section of the build gave us some difficulty as it had to be able to lift a relatively large amount of weight while only really being attached to two motors on the arm itself and those two motors alone didn’t have the power. By the end of the project, another motor had been fixed to the upper side of the upper arm which connected to the forearm via string and have the base motors a bit of assistance in holding position.
The Hand: Despite being only made of lego the hand had a surprisingly large grip and was able to grab/hold on to relatively heavy drink bottles. A problem initially encountered with this was that when these motors were set to run a specific distance and were unable to do so instead of staying locked in there position they would pulse forward and back to try and clear the blockage, this was overcome by setting them to move till they were stalled by an obstacle and then locking allowing them to solidly grip almost anything that fits into the hand.
If we were to redo this project we would probably start by removing most of the lego entirely and 3d printing components for the hand and arm. This would simultaneously make the arm lighter, stronger and make it possible to actually be attached to a human to function as a bionic arm. We would also probably look at some alternative motors as the motors in the wrist and elbow could really have used some extra power to run smoother.

Acknowledgements
The arms structure was made entirely without online research however we would like to thank other members of the 2020 Robotics and Game Design course at Hobart college for their ideas. We also wish to thank our teacher who was able to get us the extra resources we required during parts of this project.
Images used in this report are copyright free and taken on site.
Project members :
- Thomas Reed (Coding, Hand/wrist construction)
- Russy Tranie (Forearm construction, reinforcing)
- Jasper Fowler(Upper arm/elbow construction, reinforcing)