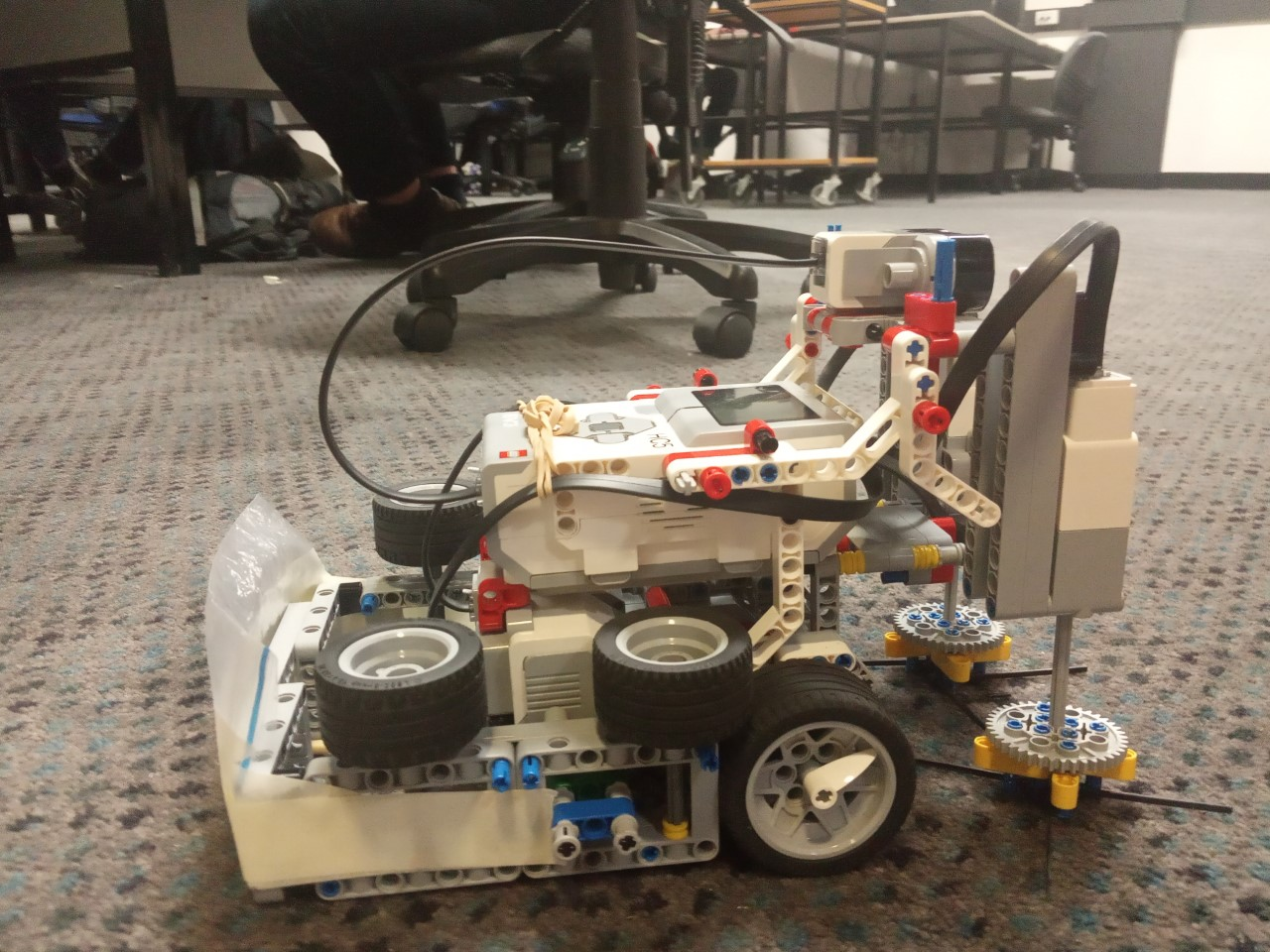
The CleanSweep is a sweeper robot designed to gather small pieces of rubbish, LEGO, fluff, etc. for sorting and/or disposal, helpful for people who struggle with cleaning (or can’t be bothered). It can detect and avoid obstacles, and is apt for cleaning most surfaces, though it can struggle on rough ground.

Our design was inspired by commercially available vacuum bots, but since these would be nigh-impossible to construct from LEGO we quickly hybridized our design with brush-based street sweepers. Our robot would push anything in front of it into and under the centre of the chassis, where it would be transferred to the rubbish-catching bag the robot carried at the back.

We ran into difficulties such as jerky movement and inability to handle rough terrain, but these were resolved by making simpler code and a more robust physical design respectively. The robot has limited storage space to collect rubbish in, but it is effective at what it was designed to do.