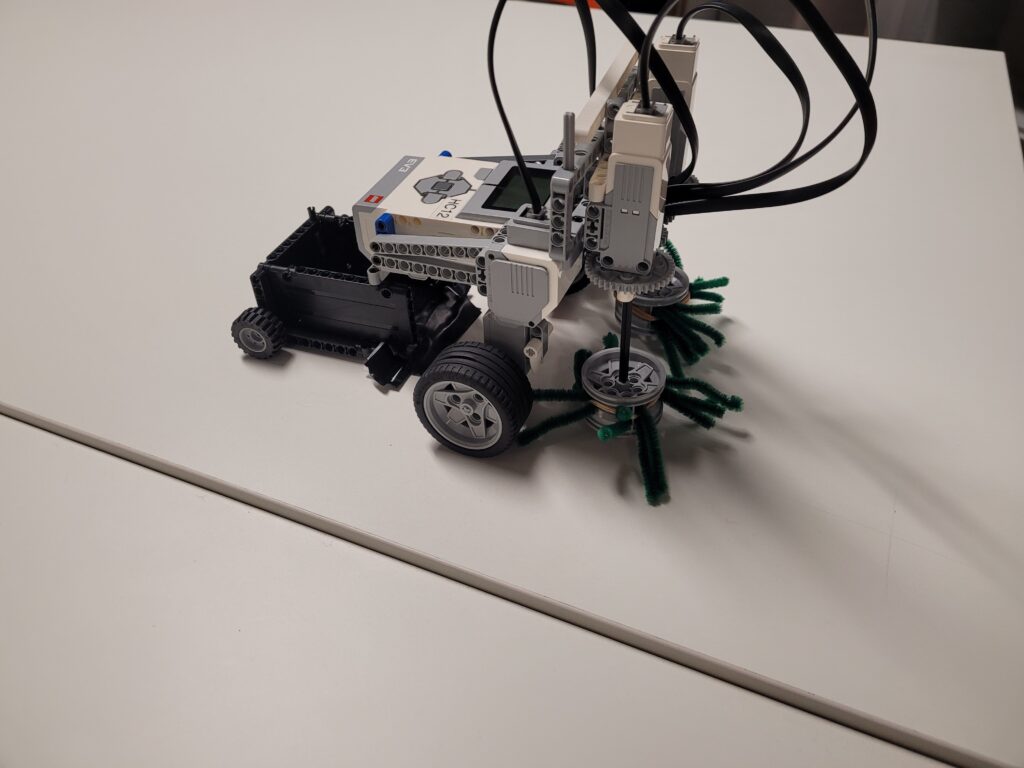
The Sweepy McSweep face is a sweeper robot designed to gather small pieces of rubbish, LEGO, fluff, etc. for sorting and/or disposal, helpful for people who struggle with cleaning (or can’t be bothered). We want it to be able to detect and avoid obstacles, and is apt for cleaning most surfaces, though it can struggle on rough ground.
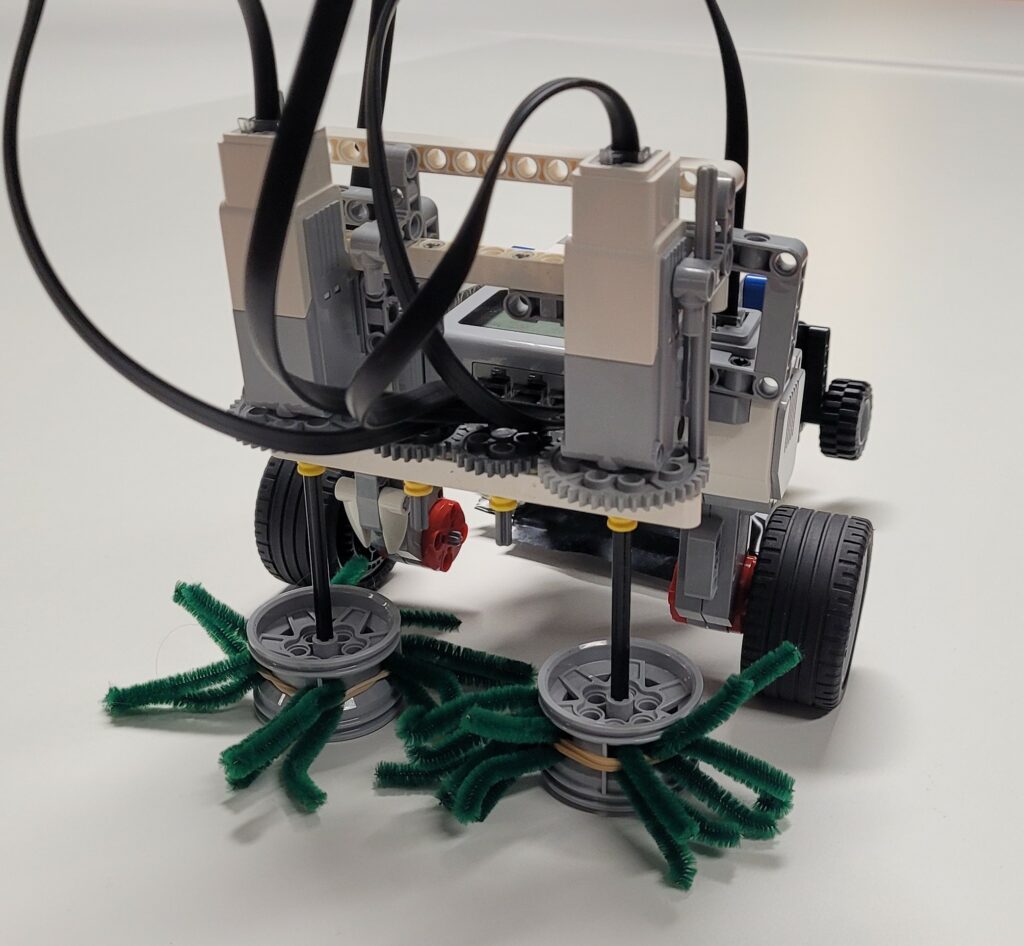
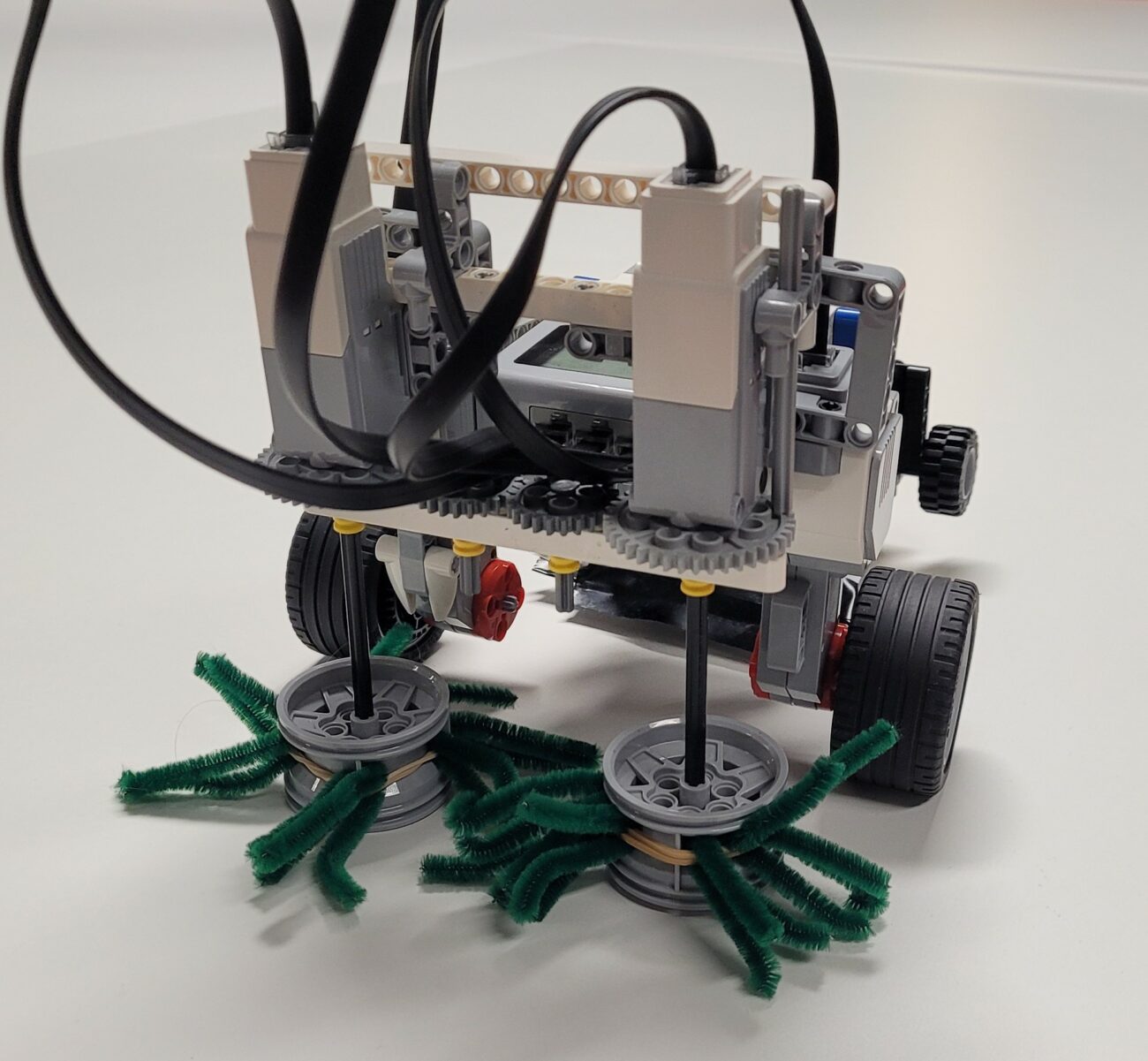
Our design was inspired by the street sweeper robots you see around in the morning that sweep up leaves and other things, but we made it a scale down version like a Roomba. Our robot would push anything in front of it into and under the centre of the chassis, where it would be transferred to the rubbish-catching bag the robot carried at the back.
We ran into difficulties such as jerky movement and inability to handle rough terrain and would come apart after a short time. The robot has limited storage space to collect rubbish in, but it is effective at what it was designed to do.