We made a wheelchair that can travel through rough terrain so, that disabled people can go on a hike and enjoy the nature.
Development
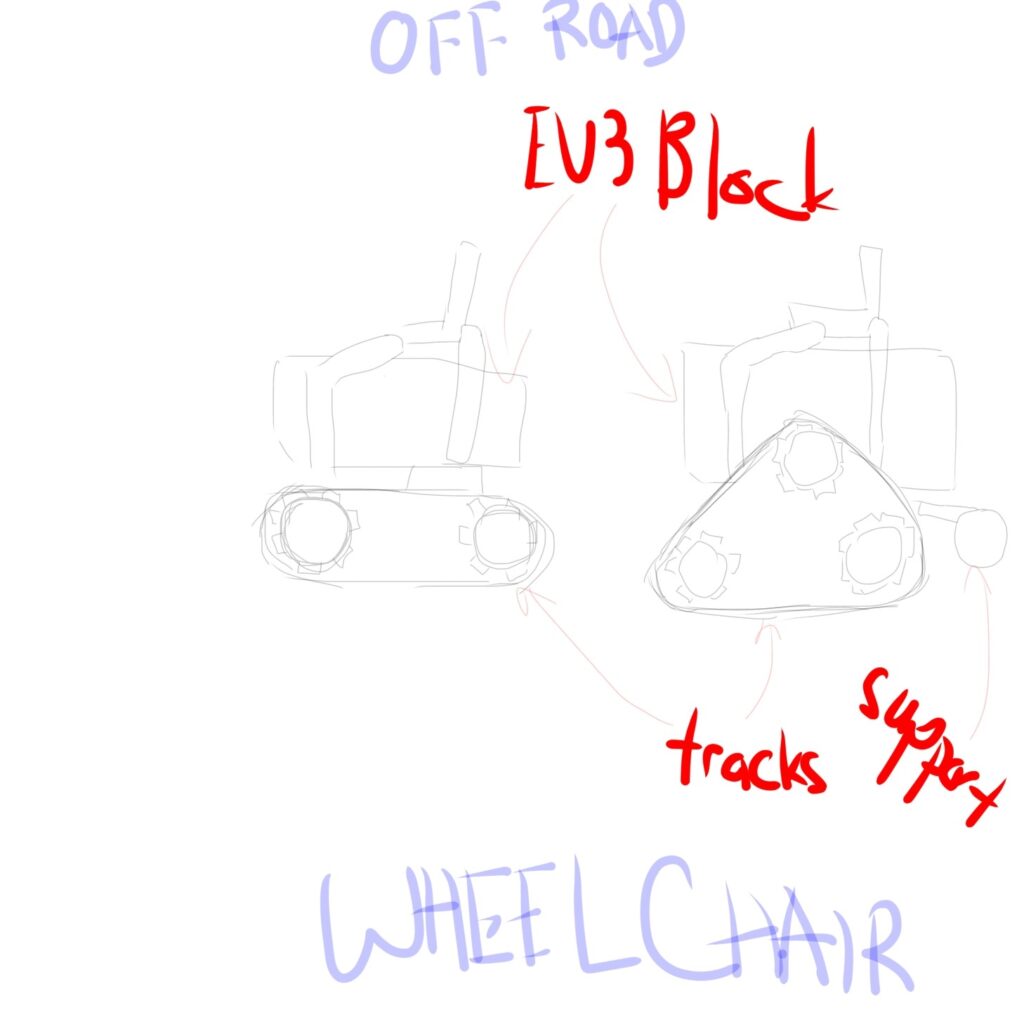
This is the sketches of what we are planning to build.
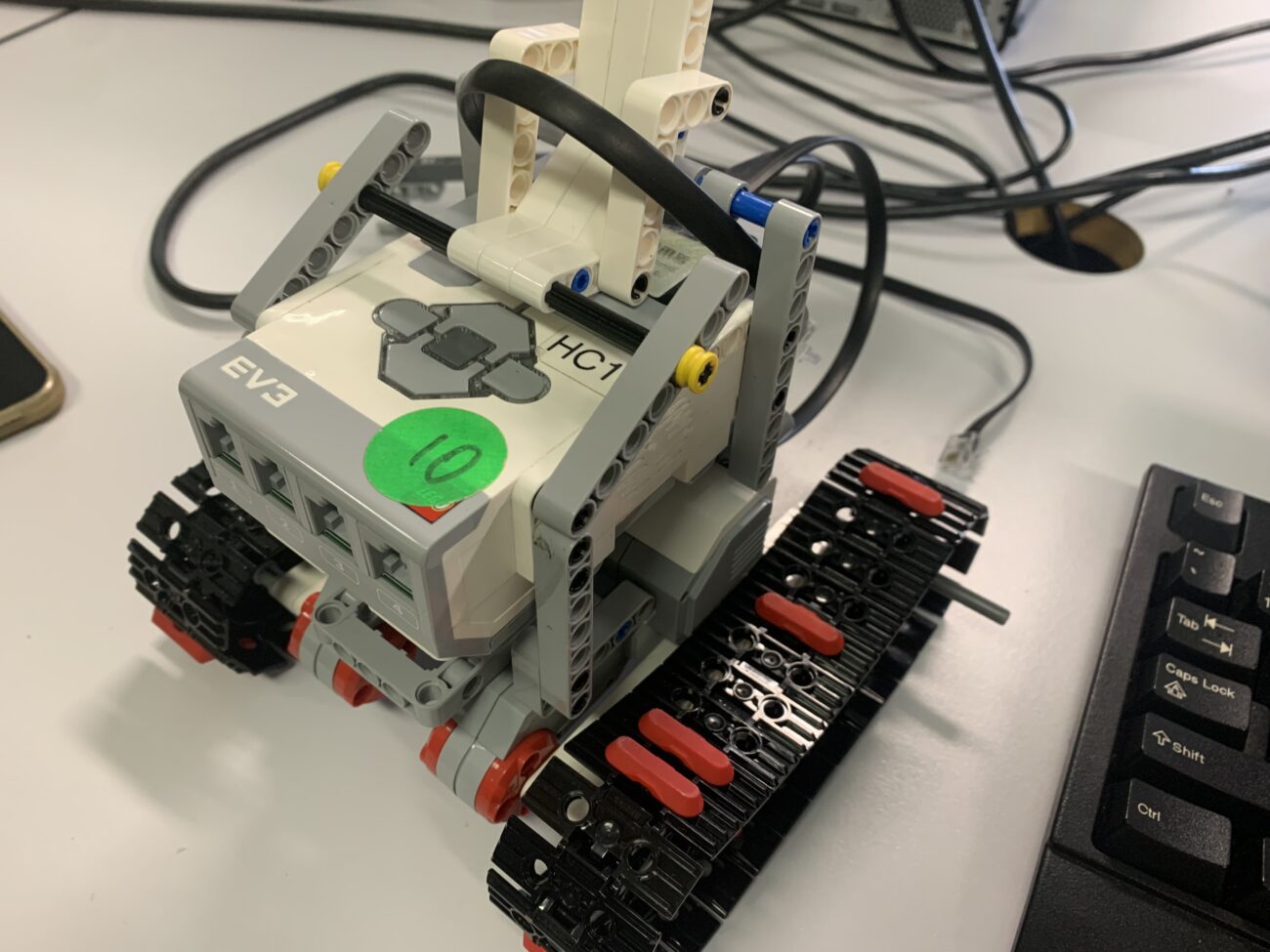
We tried to use the knob angular wheel with the tank tracks on the first build.
It wasn’t working with the tank tracks so, we try to add another knob angular wheel at the top, but that also wasn’t work. We decided to change the wheel to the more compatible gear.
We program it and add 4 touch sensors to make a control system, but we can’t find a way to hold the touch sensor in place so, we change it and use the button on the EV3 brick instead.
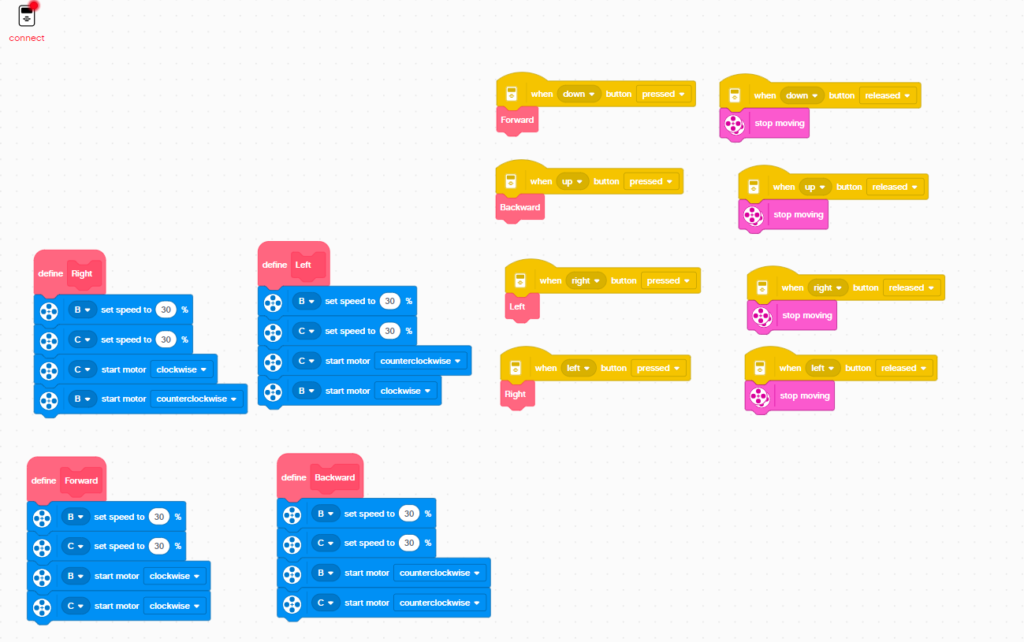
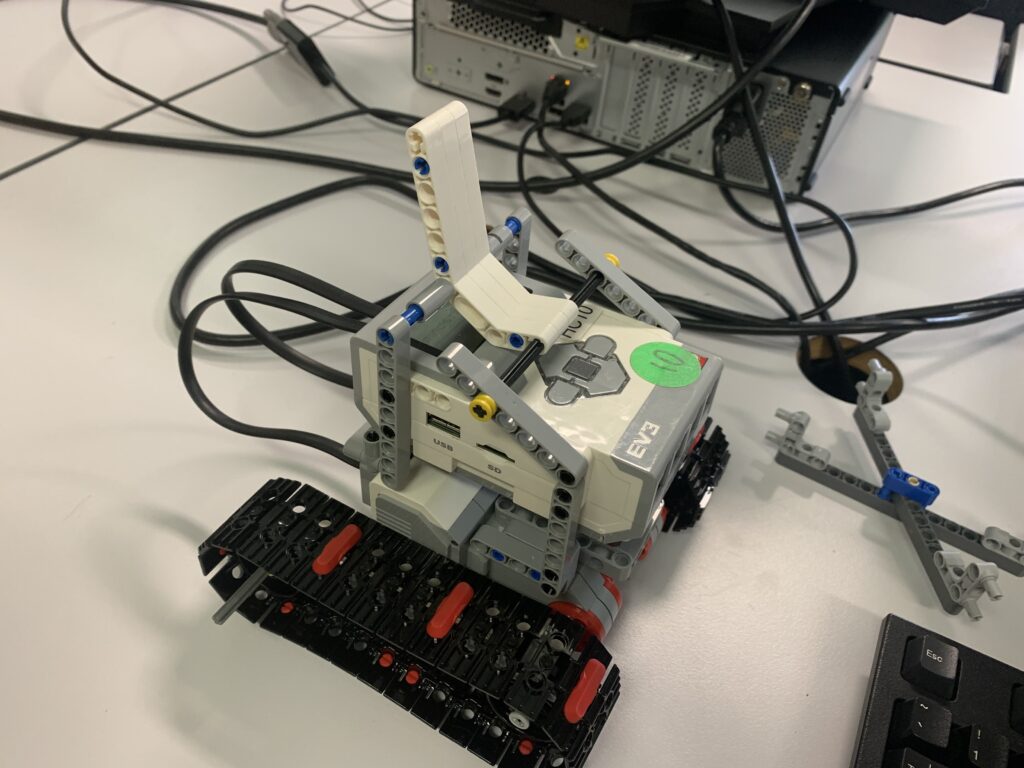
We add a chair and reprogram it. It worked. It can climb over the cord or even keyboard effortlessly.
Reflection
It works well according to the success criteria. It’s easy to use. The user can use the joystick to fully control it. And with the tank tracks it can travel on any kind of terrains whether it’s dirt or sand. The seat is secured and hold in place with the seatbelt that helps with the safety aspect of this wheelchair.
We learnt to do enough research before making the actual robot and making sure that everything is working so, that we don’t have to break it apart and built it again. Try to find an easier and efficient way to making things.