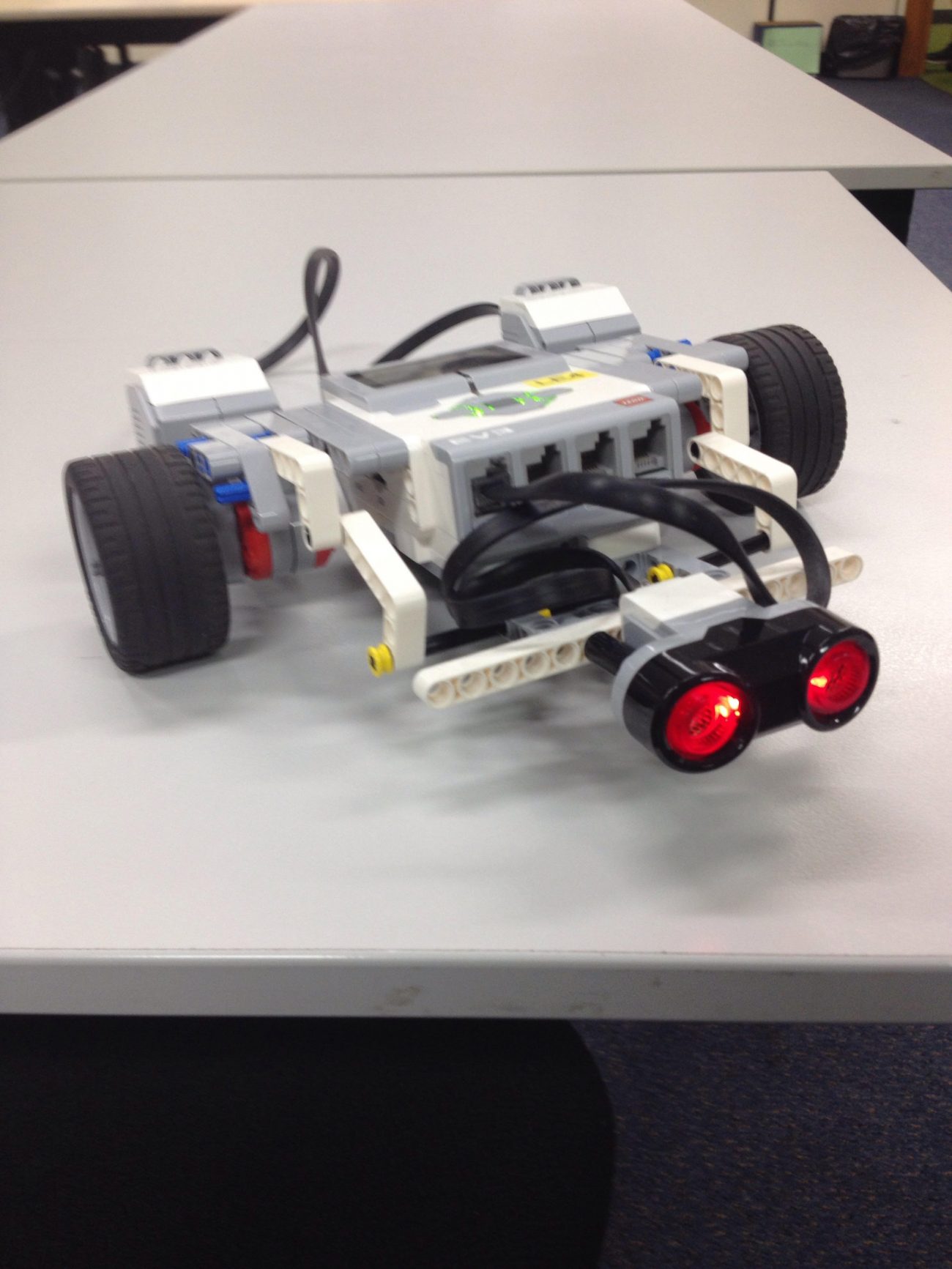
 This remote car is a wireless Bluetooth car that drives in a matter of forward and back as well as a haptic steering system and doesn’t compromise speed. It comes with another Ev3 brick that is the remote control connecting wireless with the car performing given actions from the remote control to the robot.
This remote car is a wireless Bluetooth car that drives in a matter of forward and back as well as a haptic steering system and doesn’t compromise speed. It comes with another Ev3 brick that is the remote control connecting wireless with the car performing given actions from the remote control to the robot.
It’s designed to be idiot-proof and for advanced manoeuvres such as advanced steering that remains in its state to reverse to complex angles.
Evolution
The original plan was to create a ultimate speed car that could be driven through Bluetooth and with drifting manoeuvres that would simulate an actual race car, Including convenient mechanics that would tell the person holding the remote when top speed was achieved (Haptics). The idea changed and drifting had not been implemented in the final design, but the idea of an no comprised speed robot didn’t change.
Reflection
The difficulty was the haptics in the program it required a whole new perspective in how it was coded the difficulty was that the program was constantly checking itself, therefore ruining the whole program requiring extra thought to on the whole solve this.

Inspiration
Racing games inspired the project heavily games such as Forza and Gran turismo. The sparked the inspiration by fast cars as well as convenient controls on their console controllers.


References
Gran Turismo 6 Playstation 3: https://media.playstation.com/is/image/SCEA/ps3-game-6888-ss2?$MediaCarousel_Original$
Forza 6: https://images-na.ssl-images-amazon.com/images/G/01/aplusautomation/vendorimages/e23a6cfd-fafd-491e-a7da-854467e6c099.jpg._CB294110165_.jpg