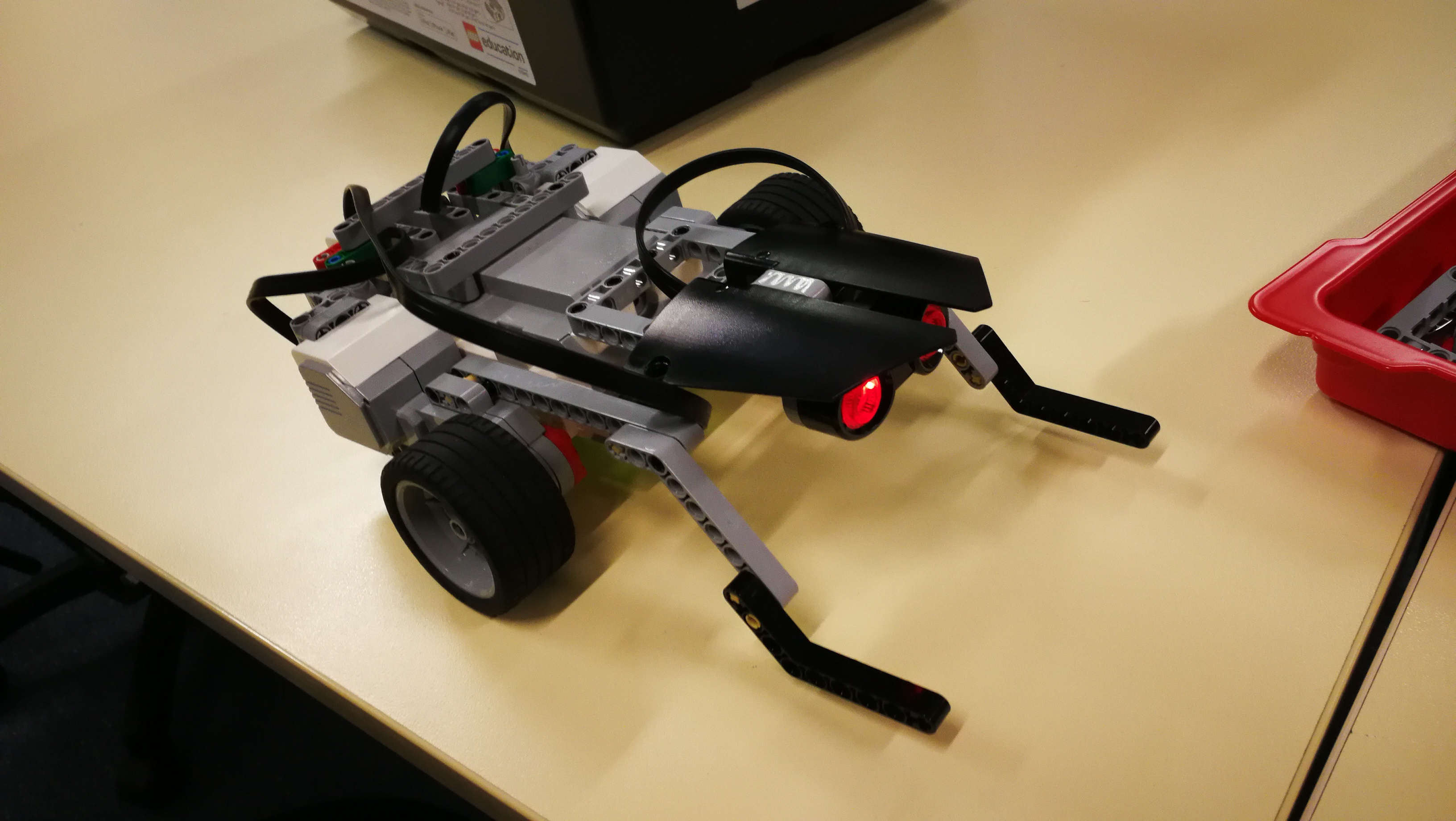
Lil’ Timmy is our automated sumo bot. Our robot used an ultrasonic sensor, colour sensor and touch sensor. The ultrasonic sensor detected other robots, colour sensor detect the edge of the ring and the touch sensor activated the robot.
How it works
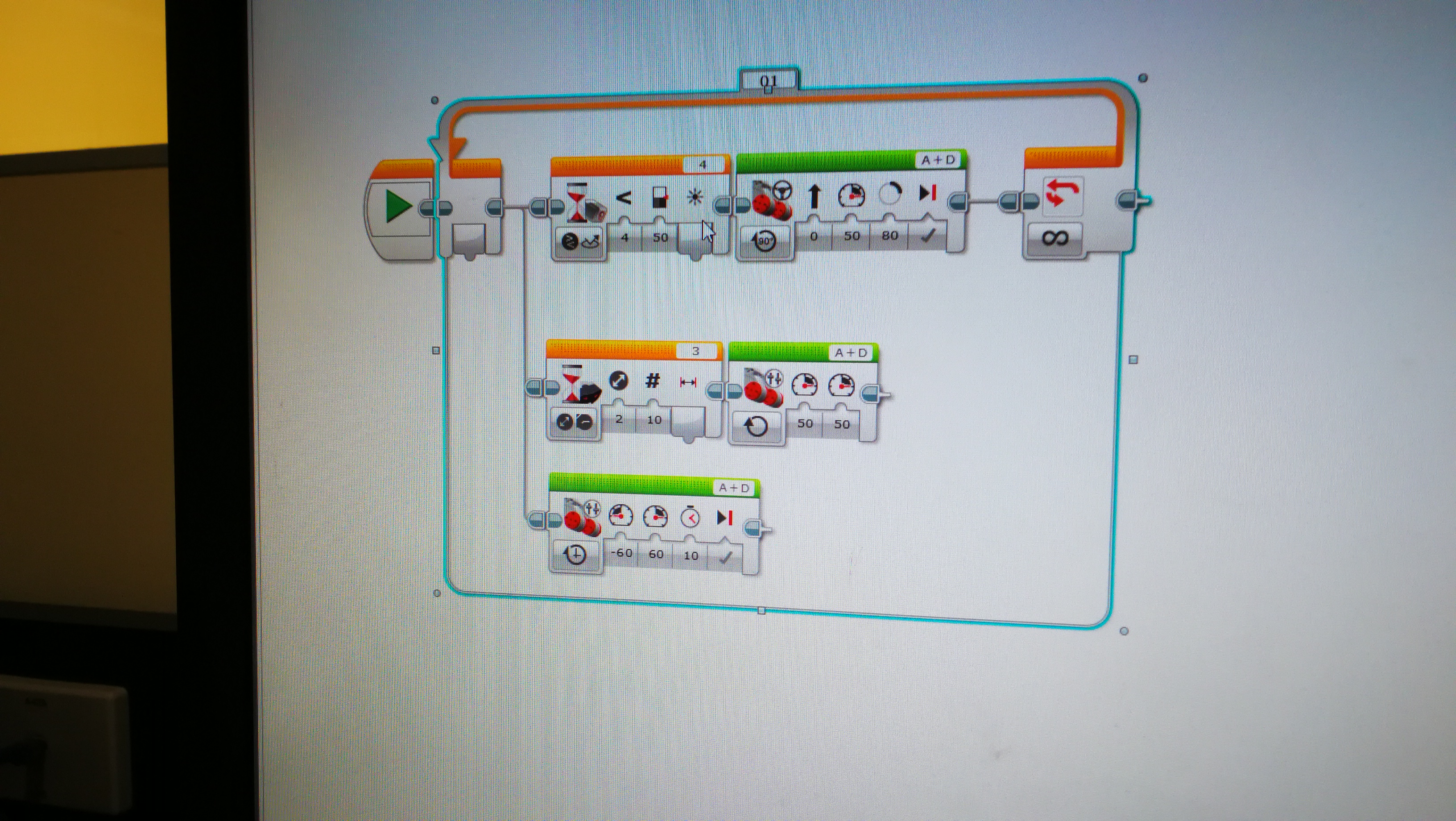
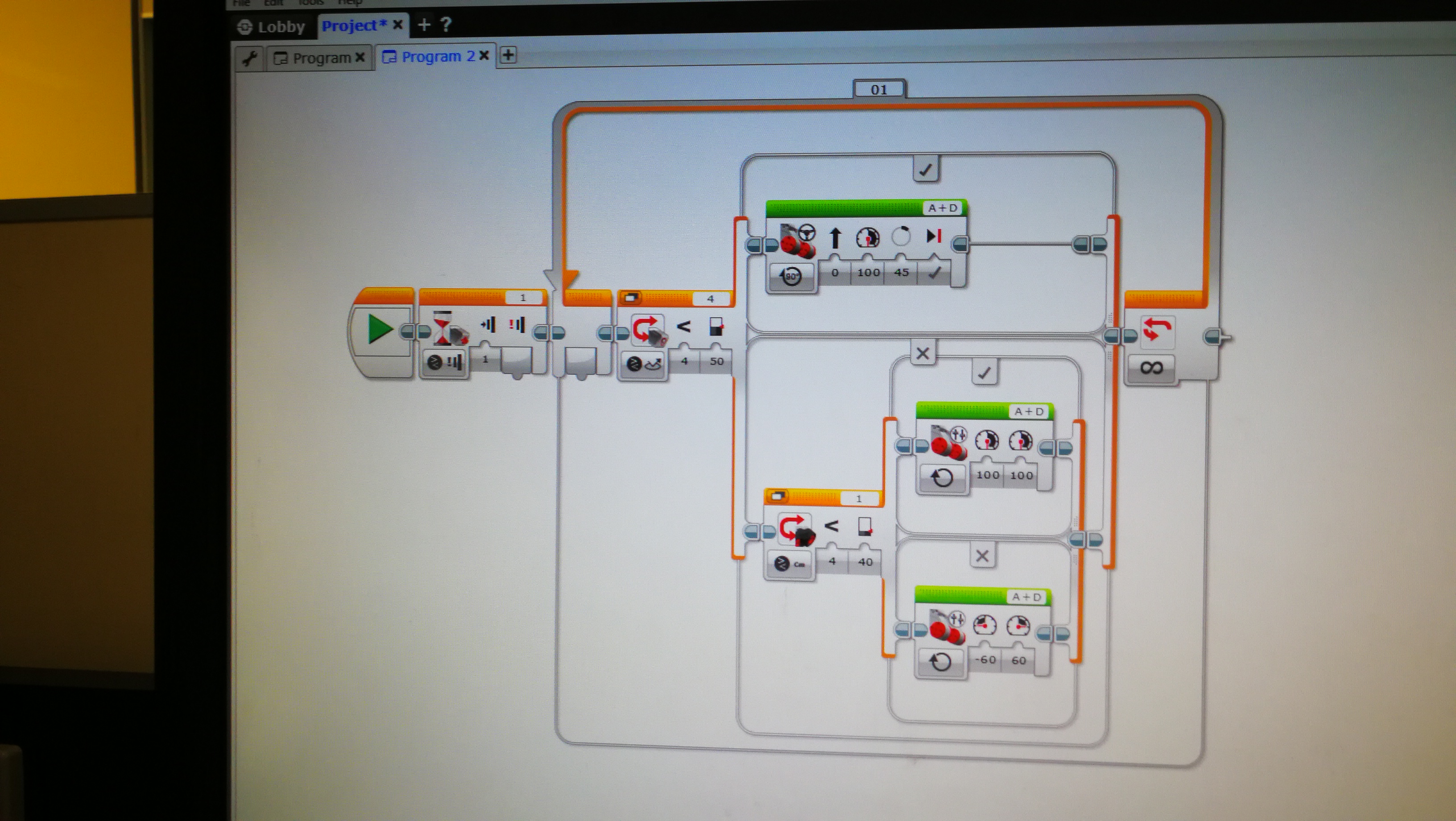
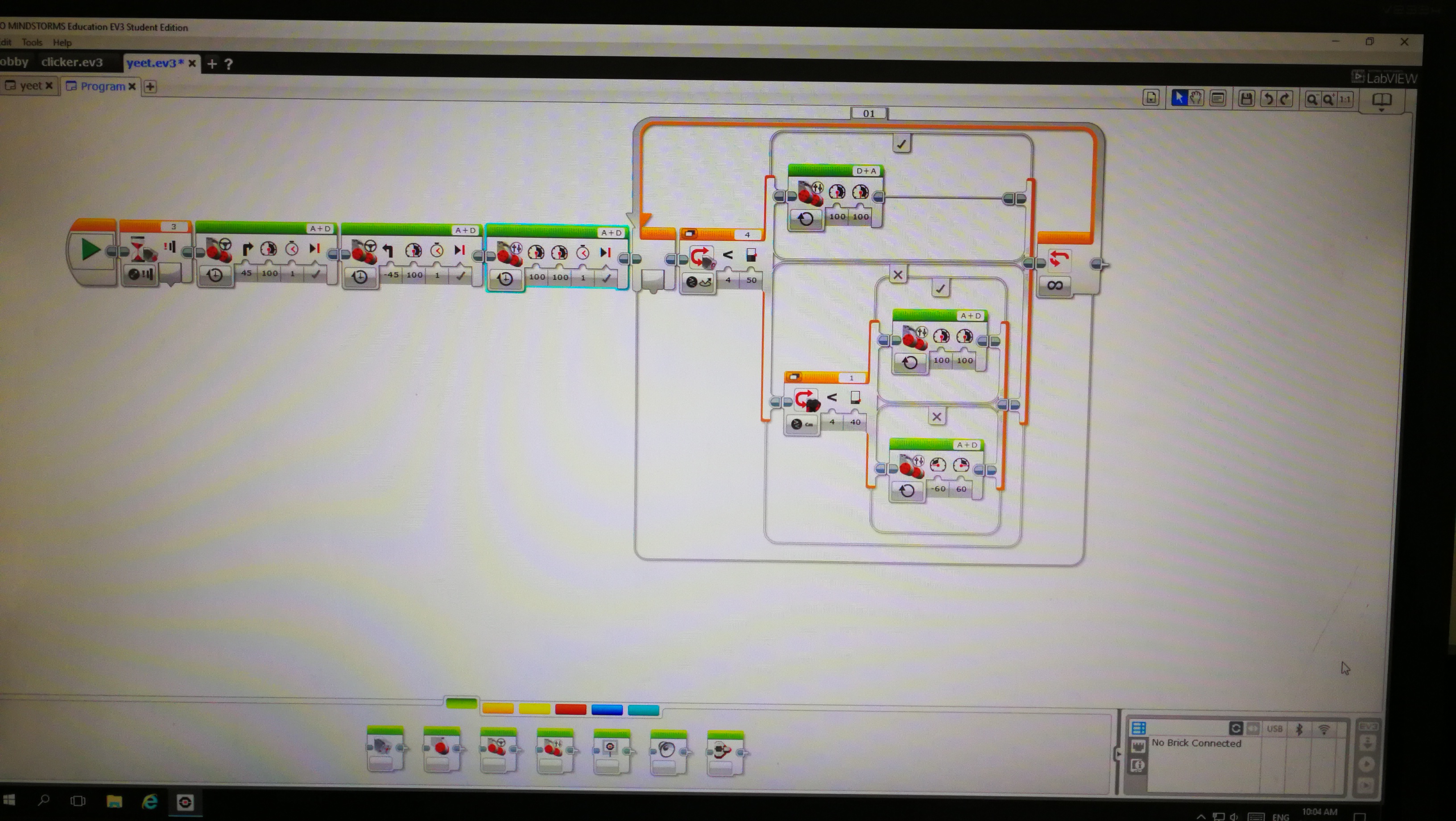
Our robot would spin on the spot until it detected with the ultrasonic sensor and then charge at them. If our robot is getting pushed from the front towards the edge, it would detect the black line that marked the boundary and turn away. We then added a little bit at the start of the code that made the robot turn 90 degrees, drive for 1 second, then turn back 90 degrees. We did this to try and stop other robots charging ours at the start, especially since ours was fairly heavy, meaning the others got a head start.
Prototypes/designs
Code
Problems
Because we had our colour sensor at the back which detected the line, this meant that our robot ended up driving itself off the ring a few times, if we did this again we would put it at the front or side because there wasn’t many times our robot was actually getting pushed backwards.
Our robot was one of the heaviest, this meant our opponents were always getting a head-start on our robot. This was one of the reasons we added a turn at the start of our code.
The ‘arms’ on our robot were more of a hindrance than a help most of the time. They came off fairly easily and didn’t really help push.
The range on our robots ultrasonic sensor was too far and often drove itself off the edge because it would detect people standing around the edge of the ring.
Will + Billy